Table of Contents
Report
Robotic Art
Authors:
Adam Dziomdziora, Daniel Nicolae Sin, Fraser Robertson, Mikko Mänysalo, Nona Pattiselano
Acknowledgement
We would like to thank all EPS-teachers for their support, feedback and guidance of our project. For helping us with the prototype and moral support we would like to thank Puria Esfandiari.
Glossary
| Abbreviation | Description |
|---|---|
| ABS | Acrylonitrile butadiene styrene |
| DC | Direct Current |
| EPS | European Project Semester |
| ISEP | Instituto Superior de Engenharia do Porto |
| IR | Infrared |
| PCB | Printed Circuit Board |
| R&R | Responsibility & Responsible |
| PESTLE | Political, Economic, Social, Technological, Legal and Environmental |
| STEM | Science, Technology, Engineering, Mathematics |
| SWOT | Strengths Weaknesses Opportunities Threats |
| WBS | Work Breakdown Structure |
- Introduction
- Presentation
The team consists of Adam Dziomdziora, Daniel Nicolae Sin, Fraser Robertson, Mikko Mäntysalo and Nona Pattiselano. We are five students with the following fields of study: Information Technology, Electrical, Electronic and Energy Engineering, Power Systems Engineering, Mechatronics and Industrial Design (see Table 1). We are an international team coming from Poland, Scotland, Finland, Romania and Belgium. Our team name is Primeira EPS tribo. We are collaborating all our knowledge to bring this project to a good end. Our main team values are support, fun and memories.
- Motivation
The development of this robot is an opportunity to learn more about robotics and programming. The team already has some limited experience with Arduino, but has never touched upon a project of this size. As future engineers this project is very interesting as robotics is an up and coming market. The specific skills acquired in our different studies comply with this project. The development of a drawing robot while regarding marketing, project management, sustainability and ethics still remains a challenge. It is never easy to work in a team. This team consists of people with different cultural and study backgrounds, making it even harder. This is however also an advantage. The team has the chance to learn a lot from each other and by sharing their knowledge work towards a common goal: bringing this project to a good end.
The main goal of the graphbot is to introduce kids to technology from an early age. This could inspire them to get into technology and later study in a STEM-field. Besides that, the robot should be a creative tool to express yourself. Both girls and boys could use the Graphbot.
- Problem
The task is to design, develop and build a robot that creates art. The team decided to build a drawing robot commanded by voice for children. The robot should be able to change the pen it is using in order to be able to draw in different colors. The robot has to go forward, backward and change the direction. The area of drawing is limited to the paper. The robot is intended for children to introduce them in technology.
- Objectives
The objective is to develop a drawing robot for children. The robot has to be able to recognize simple voice commands and respond accordingly in a timely manner. The robot should be user-friendly and childproof. It has to be easy and clear how one must use the robot. The drawing area should be detected automatically, ensuring the robot does not draw on the floor or table. The user should be able to change the drawing color with ease.
- Requirements
This project is part of EPS@ISEP2016. The European Project Semester is a program that brings students together from all over Europe. The program was designed for engineering students, but others can participate as well. The students are divided in small groups from 3 to 6 students preferably from different countries and with another study field [23]. Every group is given a different project to work on during one semester. There are classes that support the project and help to develop it. These topics of these classes at ISEP are: marketing, sustainability, ethics, project management, communication and an Arduino crash course. The students are supported by the EPS-team which consists of teachers from various study fields. The team were given certain requirements that our robot should fulfill by the EPS-team [1].
The robot should:
• Move on a plane
• Work with distinct colors
• Be aesthetically pleasing
• Allow changing the drawing paper
• Have as maximum dimensions 1.00 × 1.00 × 0.80 m
• Reuse materials if they are provided
• Use low cost hardware solutions
• Use open source software
• Comply with the Machine (2006/42/CE 2006‐05‐17), Electromagnetic Compatibility (2004/108/EC 2004-12-15), Low Voltage (2014/35/EU 2016-04-20), Radio Equipment (2014/53/EU 2014-04-16) and Restriction of the use of certain Hazardous Substances(ROHS) EU Directives.
- Functional Tests
In order to evaluate our work we have to perform certain functional tests. These have to give us some insight in where the drawing robot can be improved.
- Test if the robot responds timely to all different voice commands
- Test if the speed is sufficient
- Test if the robot can change the colors automatically
- Test if the robot can detect the edge of the drawing area and responds accordingly
- Test the usability of our graphbot
- Project Planning
Any project has to be planned carefully. In order to achieve a good planning we are given some classes in project management. The first task we were given was to make a WBS. Besides this we also made a Gantt chart in which you can see the planning and progress of our project. The project planning is discussed more thoroughly in chapter 3: Project Management.
- Report Structure
| Chapter | Title | Description |
|---|---|---|
| 1 | Introduction | Presentation of the team, project and main goals |
| 2 | State of the art | Analysis of the existing products |
| 3 | Project management | An overview of how we planned this project |
| 4 | Marketing plan | An insight in the marketing situation and implementation of our product |
| 5 | Sustainability | How do we make our graphbot more sustainable? |
| 6 | Ethics | The ethical concerns regarding our product |
| 7 | Project development | The progress of our project |
| 8 | Conclusion | This chapter discusses the project and all future possibilities |
- State of the Art
- Introduction
This chapter shows the work done as a group when researching products already on the market which could be similar to the final design and ultimately selecting the path that would be most beneficial to the team and the customer. The team researched the existing products in this market and compared them. In the conclusion the choices that were made regarding the project are described.
A drawing robot is a machine that can draw. In the project the team will use a pen or marker to create art. In other robots, the use of paint is involved. The robot should be able to hold a pen and move it over a surface. The input could be given by various actuators. It could be by an existing drawing, a picture or a person controlling it. In some cases the robot draws on its own.
- Existing products
Another choice that had to be made was the type of input the user would use to command the robot to perform certain tasks. There are many ways in which humans can interact with robots, but the team researched four of the most popular and easily usable command methods for the project. The method of communication that will be used is sound. Whether it be words, tones or decibel levels, sound is the easiest way to communicate as the user can easily express what they are attempting to say so that other humans or robots can understand and respond in the correct manner.
Another form of robotic art which is commonly used in society is the drawing robot which travels on wheels. This consists of a robot with 2 wheels and the pen attached at to the robot so that the device is stable and can travel around the paper freely but has no particular precision when drawing.
An uncontrollable method of drawing on paper using a robot is that of a vibrating robot. These gadgets are used by some but not particularly by artists as they have virtually no control over what is being drawn [3]. One of the less well known methods of robotic art is the Egg-Bot. Although this product is not used for writing on paper on a flat surface, it allows the user to draw on objects that are almost impossible to accurately draw on.
A method that was carefully considered for the project was the spider robot which had four poles, one in each corner of the table or work surface, and string attached to each which all were attached to a pen or marker in the center of the paper. This type of drawing robot was considered as it would be easy to construct with four motors controlling the length of the strings. The pen would be controlled by the string attached to each corner either lengthening or shortening depending on where the user would want the pen to be on the paper.
The last type of robotic art form that was looked at was the printer robot. Basically, this type acts in the same way as a computer printer but would allow the user to print on any type of surface [4].
Another choice we had to make was the type of input we would use to command the robot to perform certain tasks. There are many ways in which humans can interact with robots, but we researched four of the most popular and easily usable command methods for the project.
The method of communication that we will use is sound. Whether it be words, tones or decibel levels, sound is the easiest way to communicate as we can easily express what are we attempting to say so that other humans or robots can understand and respond in the correct manner.
When the use of sound cannot be used effectively, gestures can be used to communicate between humans and robots if a camera is linked to the robot. This means that the camera can recognise certain gestures performed by a human and pass the information onto the robot to perform the tasks already set in the programming stage [5].
A camera which is attached to the robot can also be used to recognise colours that are placed in front of it. The different colours of paper, cardboard etc. can be used to signal a different command which will be carried out by the robot.
The last method of interacting with the robot that we investigated was the smartphone application. This is probably the most up-to-date method of communication as smartphones have only became reasonably priced for the public for around 5 years or so. The application would show several buttons on the screen with commands for the robot to perform which the user would only have to select.
- Comparison
Once the team had researched all available possibilities which appealed to the group in terms of the structure of the robotic drawing device and the type of input that would be used to command the robot, the team could then compare them against each other in terms of advantages, disadvantages, the parts used for construction and the cost of the materials. These construction and input methods appealed to the team as they instantly took the interest of every team member, they were aesthetically pleasing stationery and when in motion, they were challenging so that the team could gain a sense of satisfaction when completing the project and they all would provide a good service to our customers. Tables 2 and 3 were created to collect all of this information for an easy comparison on all subjects.
| Method | Advantages | Disadvantages | Materials | Web-links |
|---|---|---|---|---|
Arm  | Easy to build. Many different materials can be used which gives a variety of options. The robotic arm design is aesthetically pleasing in the way it moves and performs tasks if constructed properly. | The materials that are used for the construction of the arm can be expensive to purchase from local providers. If not constructed correctly, the movement of the arm can be sudden and jittery. The arm can only reach a certain radius when in use. | Meccano, MeArm | http://www.makeblock.cc/mdrawbot-kit/ |
Wheels  | The wheeled construction of the drawing robot can operate over a large area on a flat surface. The base would not cost very much to buy or construct along with the electronics. The base is simple to build with the correct components. The Arduino board would be easy to program for the functions the robot is to carry out. With the wheels, the device can move freely around a plane. | The wheel method can also be less precise when in use compared to the arm and other methods. One of the drawbacks of the wheel method is that changing the colour of the pen could prove to be difficult. | 2 wheels, 3 motor | http://www.makeblock.cc/mdrawbot-kit/ |
Vibration  | The vibration technique for the robot could turn out to be easy to make and relatively cheap. | The vibration of the device causes it to be unable to continue in a single direction steadily. It is almost impossible to control the movement of the device. The device has extremely random movement which would not be suitable for creating art. | Vibration motor, | http://www.instructables.com/id/Drunken-drawing-robot-/ |
EggBot  | The egg method allows the user to be able to print on difficult surfaces. The structure of the device allows the painting of Easter eggs to be carried out very easily. | This type of drawing machine can only draw on a limited number of objects. | Motor x2, Pen positioning system, Egg holder, Microcontroller | http://www.makeblock.cc/mdrawbot-kit/ |
Spider  | The spider device can cover a vast area of a plane if long enough strings are used. This method can be used on a horizontal or vertical plane. | Drawing in the corners of the page could prove difficult. If a four string system is used then it would be hard to calculate the length that some strings would need to contract or expand. | Motor x4, Pen holder, Strings x4, System to attach at end of canvas, Microcontroller | http://www.makeblock.cc/mdrawbot-kit/ |
Printer  | The printer drawing robot can provide a good level of precision. The drawing time will be decreased if many of the same drawings are to be printed. | The construction of this robot would be very complex. The cost of the materials could be increased as at least 3 motors would need to be purchased. The programming would be extremely challenging. | Mechanic materials | http://www.chinahae.com/product_yc-s25op-state-of-the-art-technology-wall-printer-for-individuality-home-decoration_13988.html |
| Method | Advantages | Disadvantages | Materials and Cost |
|---|---|---|---|
| Sound | Using sound could be easier for the user as it requires little effort to give commands. Anyone of all ages can give commands easily. When using sound recognition, many different sounds can be programmed into the system. | Some accents may not be compatible with the system. The system may not be able to function properly in a noisy environment. | Microphone |
| Gesture | The camera can recognize the gestures given. Can recognize colours that are placed in front of the camera. | It would be very costly to make. Detecting multiple objects can be difficult for the system. Can only operate in an environment with a lot of light. | Camera |
| Application | The application for smartphones method would have good precision when drawing. | The app for the system would be very time consuming and complex to create and link with the drawing device. A smartphone would be needed to command the drawing device. | Smartphone, Bluetooth module for robot |
- Conclusion
After comparing these sets of methods of construction of some drawing robot and the way in which it receives a command, a final decision could be made on what direction the project would be heading in.
The robot structure that the team decided on using was the wheels method in which the device can move around on a plane on wheels with a pen attached to the front of the device. We decided this was the best solution for the task as the device can draw over a large area on a plane. The base of the robot would be easy to build and relatively cheap to buy the parts for with the correct components. The programming of the robot would be easier than that of the other options and with the wheels, the device can move freely around the paper. The materials for the whole robot would be within the budget as well which may not have been the case for other options.
It was also decided that sound would be the best option for the input to command the robot. This is the best option as it can be used by people of all ages and fun can be had when using the system to create drawings.
The next chapter to be discussed is that of project management and how the project manager must handle all aspects of the project from defining the project scope to the planning of each part of the project.
- Project Management
- Scope
In Project management defining the project scope is the most important part. If it is not clear what has to be delivered to the customers in the end and what the boundaries are, the chance of failure will be high. In most of the instances, there actually is no chance to success with this unorganized approach.
The project is to make a robot that creates art through sounds. The robot has to work by following conditions:
• Move on a plane
• Work with distinct colours
• Be aesthetically pleasing
• Allow changing the drawing paper
• Have as maximum dimensions 1.00 × 1.00 × 0.80 m
• Reuse the provided materials
• Use low cost hardware solutions
• Use open source software
• Comply with the Toy directive (2006/42/CE 2006‐05‐17), Electromagnetic Compatibility (2004/108/EC 2004-12-15), Low Voltage (2014/35/EU 2016-04-20), Radio Equipment (2014/53/EU 2014-04-16)and Restriction of the use of certain Hazardous Substances(ROHS)EU Directives.
The project deliverables are:
• Interim Report
• Interim Presentation
• Leaflet
• List of Materials & Components
• Final Report
• Final Presentation
• Paper
• Poster
• Manual
• Video
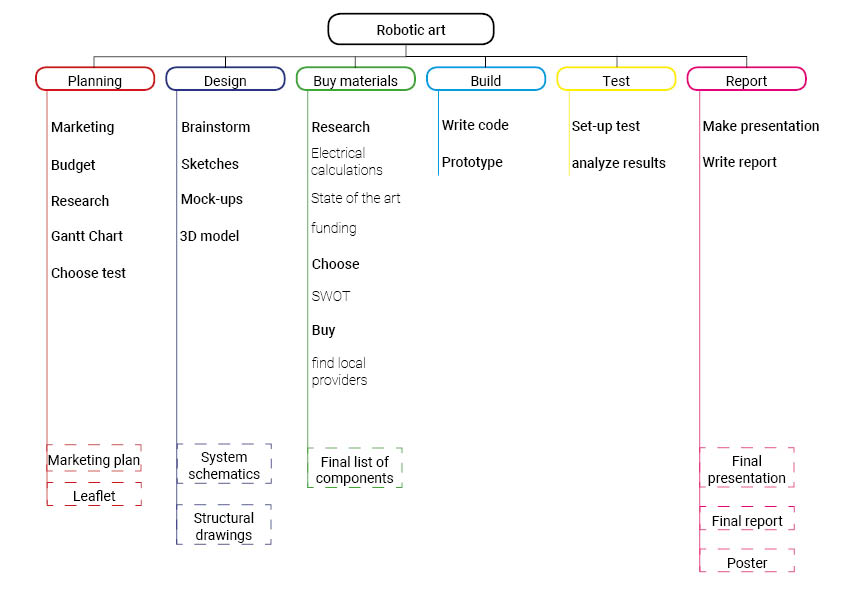
This is the Figure 1, presenting Work Breakdown Structure of the project.
- Time
In order to illustrate the project schedule, decision was made to use a Gantt chart. It is commonly used in project management to create a clear structure of the steps which have to be taken in a specified amount of time.
The Gantt chart has been created in MS Project 2016.
It shows the timeline from Mon 29.02.16, up to Tue 28.06.16, when all of the tasks will be finished.
This chart allowed the team to instantaneously check at which stage of the project team members are, if they have any delays and what our next steps are.
Gantt chart is presented in Figure 2.

Above that, all the team activities connected with Project Management, can be found in MS Project 2016 File, available here projectmanagementeps_2.zip
- Cost
Project Cost Management includes the processes required to ensure that the project is completed within the approved budget.
There are 4 processes in this knowledge area including
Resource planning: Resource planning involves determining what physical resources (people, equipment, materials) and what quantities of each should be used to perform project activities. It must be closely coordinated with cost estimating.
The budget for this project is 150 € which is to be used for materials and components to complete the prototype.
Estimating Costs: Cost estimating involves developing an estimate of the costs of the resources needed to complete project activities.
Cost budgeting: Cost budgeting involves allocating the overall cost estimates to individual work items in order to establish a cost baseline for measuring project performance.
Here is list of the Graphbot components, in Table 3
| Component | Quantity | Description | Price |
|---|---|---|---|
| Small Reduction Stepper Motor | 1 pc | Motor for pen switching | 6.46 € |
| Motor Driver L298N | 1 pc | Driver for DC motors | 3.99 € |
| 3 Wheel Robot Kit | 1 set | Platform for the Graphbot with wheels and motors | 20.17 € |
| EasyVR Shield 3.0 | 1 pc | Voice Recognition shield for drawing commands | 59.9 € |
| Battery holder | 1 pc | For battery placement and connection | 5.17 € |
| 9 V Battery | 1 pc | Power supply for the Graphbot | 1.85 € |
| Bread Board | 1 pc | For connecting the circuit | |
| Reflectance infrared analog sensor QRE1113 | 1 pc | Drawing area detection | 3.00 € |
| Arduino Uno R3 | 1 pc | Motherboard for the control system | 22.45 € |
| Standard wires | 1 set | For connecting the components | 3.99 € |
| Force springs | 4 pc | Springs for the pencils | |
| Total | 126,98 € |
Cost control:
When choosing or making changes in the components to our project we have to take into consideration the quality of the products and the price so we stay within the budget limits. Also the stakeholders have to be kept informed and they have to give permission for us to go ahead with changes in cost. We do not want to make irrational decisions about cost changes without consulting everyone in the process. Then when changes have to be made we make sure to record everything correctly in the cost baseline.
- Quality
In order to deliver a high quality project, following issues have to be concerned:
Customer Satisfaction
Customer must feel that the final product meets their needs and way of production fulfils his expectations.
If not, the customer is very likely to consider the project quality as poor, regardless of what the project manager or team thinks.
Inspection, testing, requirements
Monitoring deliverable to evaluate whether they comply with the project’s quality standards and to identify how to permanently remove causes of unsatisfactory performance.
Continuous Improvement
Continuous improvement is simply the ongoing effort to improve products, services, or processes over time. These improvements can be even really small, not always major or breakthrough
Customer is most likely to buy a product, which is maintained & improved continuously.
- People
People management or human resources is a part of every project planning. Tasks are assigned to single team member but every group member will be available to assist others if needed.
- R & R
R & R it is relation between each process & role conducted by team members and responsibilities accordingly. It enables the team to obtain a motivation and it enhances the performances. I addition, R&R supports project management very well.
Table 4 presents the matrix of R&R
| Task | Adam | Daniel | Fraser | Mikko | Nona | All | Supervisors |
|---|---|---|---|---|---|---|---|
| Brainstorm | R | A,C | |||||
| State of the Art | R | I | A,C | ||||
| Structural Drafts | R | I | A,C | ||||
| System Diagrams | R | I | A,C | ||||
| Structural Drawings | R | I | A,C | ||||
| System Schematics | R | T | I | A,C | |||
| List Of Materials | R | I | A,C | ||||
| Mechanical construction | R | T, I | A,C | ||||
| Electrical assembly | T | T | R | R | A,C | ||
| Programming | R | R | T | T | A,C | ||
| Marketing Plan | R | R | A,C | ||||
| Project Management | R | R | A,C | ||||
| Eco-eficiency Measures for Sustainability | R | A,C | |||||
| Ethical and Deontological Concerns | R | A,C | |||||
| media & leaflet | R | I | A,C | ||||
| Proposed Solution | R | A,C | |||||
| midterm presentations | R | A,C | |||||
| final report | R | A,C | |||||
| final presentation | R | A,C | |||||
| Functional Tests | R | A,C | |||||
| Materials research | R | T | A,C | ||||
| Bibliography chapters | R | A,C |
- R : Responsible
- A : Approval
- C : Consultant
- I : Informant
- T : Tester
- Communications
Communication management takes into consideration the information flow related to every issue connected with the project between a entire team. Moreover, communication is an essential part of conducting business, and therefore the team is using various methods to communicate in a workplace.
Face-to-Face Communication
Most of the time a communication is based on meetings. This type of communication takes place at least once a week, but nowadays often everyday.
Moreover, every week the meeting with supervisors takes place on the project problems and we strongly believe that face-to-face communication is the most efficient way to work.
Mobile phone
If any urgent or important situation appears, in order to collect all the members quickly and inform about the situation, calling or sending SMS is the best method.
Email is a preferred method of communication with supervisors as team can discuss with them our doubts and issues at anytime.
In behalf of portal Office 365, we have obtained a possibility to fast & easy email whoever team need to.
It is cheap, user friendly and furthermore it is a fast way of communicating with each other. Nowadays it is the most popular online social networking service, and often most of us has it connected on our mobiles.
Here is table 5 presenting our ways of communication
| What | Who | How | When | Why | To whom |
|---|---|---|---|---|---|
| Weekly supervisors meeting | Team | Meeting in F503 | Every Thursday | To evaluate progress and discuss | Supervisors |
| Team meeting | Team | Facebook/mobile | Every day | To discuss and develop the project | Team |
| Weekly performance assessment | Team | Meeting | Every week | To monitor and execute project development | Team |
| Contact with direct supervisor | Team | Email/meeting | In an urgent situation | To obtain additional feedback, discuss problematic situations and improvement the project | Direct supervisor |
| Interim deliverables | Team | Presentation/Wiki report | 22th April 2016 | To present current project advancement and part of finished work | Supervisors |
| EPS classes | Teachers | Classes | Every day | To pass necessary knowledge and provide additional informations for further project development | All EPS students |
| Material list feedback | Teachers | Every time after sending some compulsory part of work | To show the place for an improvement and provide feedback each component | Team |
- Risk
The benefits of risk management in projects are huge. There is a lot of money to be gained uncertain project events are dealt in a proactive manner. This will result in minimizing the impact of project threats and seize the opportunities that occur. This allows to deliver the project on time, on budget and with the quality results that the project sponsors demand.
Project risk management in its entirety, includes the following six process groups:
- Planning risk management
- Risk identification
- Performing qualitative risk analysis
- Performing quantitative risk analysis
- Planning risk responses
- Monitoring and controlling risks
Table 6 showing the risk management
| Description | Cause | Effect | Trigger | Response | Owner | Last review | Threat level |
|---|---|---|---|---|---|---|---|
| Broken components | Using in improperly way | It will not be possible to build the prototype | Overheating / bad data | Discuss with the professor of ordering new materials | Fraser | 14 April 2016 | Medium |
| Team members getting sick | Virus / Bacteria | Will slow down the work rate and possibly even cause missing deadlines | Team member feels bad | Others have to step in and take the extra work | Sick team member | 14 April 2016 | Medium |
| Not meeting interim delivery deadlines | Laziness / problems with research | The grades will be lowered | Not completing previous milestones | Plan well ahead to avoid these situations | Adam | 14 April 2016 | Low |
| Faulty components delivered | Transporting without protection / production error | Can't build the prototype on time | Obtaining bad result in multimeter | Demand new parts from the sender | Mikko | 14 April 2016 | Low |
| Prototype will not work | Bad planning / lack of knowledge / bad calculations | Project failure | Bad results during the tests | Discuss with the teachers about new solutions and avoid this situations with careful planning | all team members | 14 April 2016 | Low |
- Procurement
Procurement management is designed to support an organization with saving a major part of the money spent on purchasing goods and services from outside. To achieve that, we have to compare the cost of all items against quality.
It is therefore obligatory to handle suppliers performance with precision, to ensure that they're deliverables meet our expectations. Although there may be several suppliers, who provide the same goods and services, careful research would show whom of these suppliers will give us the best deal for our project.
Due to restrictions we are only allowed to use local Portuguese providers. However, not all goods and services needed to be purchased from outside.
- Stakeholders management
In Stakeholders management, we think of ways to keep stakeholders expectations satisfied. Stakeholders are those who are affected by or affect the results of the project. Making sure you meet deadlines and make a good quality product can be a part of stakeholder management. In our project there are different stakeholders in the university, with different expectations. In this chapter we introduce these stakeholders and their expectations. Our stakeholders are for this project, all the supervisors, the team members and also the university. Defining project stakeholders and making sure you understand the different expectations you can create a strategy to keep good relationships with the stakeholders. During this project our different teachers from Sustainability, Engineering ethics, Marketing & Communication and Project Management teach us how to do the reporting on the project and keep a close eye of the progress.
Table showing the Stakeholders 7 and a graph presenting them 3
| Stakeholder | Role | Expectation | Power | Interest |
|---|---|---|---|---|
| Project team | Project planning and execution | Learn new skills and to make a product that works | High | High |
| Benedita Malheiro | Chief supervisor of EPS | Successful project and a good report | High | High |
| Teachers | Teaching important things on projects | Expecting the project teams to follow the subject guidelines on projects | Low | Medium |
| Supervisors | Supervise and assist the project development | That project teams meet the deadlines and complete a functional project | Medium | High |
| ISEP | The University | Expect that EPS students respect the rules of the university and complete the work | Medium | Medium |

- Conclusion
Project Management is one of the main aspects of realization a project.
It is an important tool, which enables the team members or the project manager to
- measure the risks of a project
- analyse responsibilities of the people involved
- monitor the cost and the budget
- create the product requirements
- manage the duration and deadlines of the individual tasks
Most importantly, project management allows all of the people involved in the project to follow the daily schedule and monitor the deadlines.
Thanks to useful tools such as “Microsoft Project 2016” or a Gantt Chart, we were able to assign each task to a team member, set the proper deadlines and expected duration for each task and deliverable, and follow the completeness of our project.
This way, we are able to be up to date with all the tasks and organize our work well.
- Marketing Plan
- Introduction
The decided target group and potential market are children. Within children the design is more specifically for girls. The idea behind this is to pick up on the trend to make technology more attractive for females. It is important to have more incentives for girls to get interested in technology such as robotics. The drawing robot will be sold as a toy for kids to get creative. In the following chapters you can read more about the research it has done regarding this aspect.
- Market Analysis
In market analysis the target group to whom the product is going to be offered to has to be specified. To do so an analysis have to be made of who would use the product and what is the competition. To start off with you should see at the latest trends in the market, general buying habits, changing technologies and competitor activity. So basically what customers want/need and what the competitors are offering.
More specifically:
- What products and services the target market is already using
- Which businesses are using the best marketing mix to provide these products and services
- If there are any shortcomings in these products and services that can be fixed to gain the attention of customers
- What external factors apart from competition and demand can affect the success or failure of the business (e.g. government economic policies)
4.2.1 Market Situation
Nowadays parents are buying tablets and smartphones to children who are at very young age and they don't have as much different activities than children used to. They like to spend hours and hours playing video games and this can be a challenge in the project. Children have a lot of different choices to choose from and introducing new kind of toys to the market has to be very well marketed to gain the interest of children and their parents.
4.2.2 PESTLE - Macro Environmental Analysis
The PESTLE Analysis is a framework used to scan the organization’s external macro environment.

4.2.2.1 Political
The political aspect does not affect the production of this product much at all. The tax regulations etc. may have variations but it should not affect the sales or peoples buying habits.
4.2.2.2 Economic
Represent the wider economy so may include economic growth rates, levels of employment and unemployment, costs of raw materials such as energy, petrol and steel, interest rates and monetary policies, exchange rates and inflation rates. These may also vary from one country to another.
Even though the economic situation is relatively poor. There is a market for this product because people still can afford technology and have to have it.
4.2.2.3 Social
Represent the culture of the society that an organization operates within. They may include demographics, age distribution, population growth rates, level of education, distribution of wealth and social classes, living conditions and lifestyle.
Having in mind that the product is targeted to children, let us take a look at the social situation of children in Portugal.
In Portugal the economic crisis has halted a long-term gradual decline in both inequality and poverty, and the number of poor households is rising, with children and youths being particularly affected. Unemployment is one of the principal reasons why household incomes declined [(Social)].
| Country | People aged 0-14 (%) | Country Population 18.6.2016 |
|---|---|---|
| Portugal | 15.9 | 10 307 842 |
| Germany | 13 | 81 272 454 |
| Belgium | 15.6 | 11 372 447 |
| Finland | 15.8 | 5 531 692 |
An ongoing trend is the need for more sophisticated toys. Children are getting more demanding and their needs are changing. The most popular robots for children now are drones. Our Graphbot follows this trend and offers new possibilities for kids. Customization is also an important trend. It could give kids a bigger connection with the robot.
4.2.2.4 Technological
Technological factors refer to the rate of new inventions and development, changes in information and mobile technology, changes in internet and e-commerce or even mobile commerce, and government spending on research. There is often a tendency to focus Technological developments on digital and internet-related areas, but it should also include materials development and new methods of manufacture, distribution and logistics.
This is an important factor to the product since it is a new technological product for the market. There are printers etc. produced by the competition but the focus is on the voice recognition and having fun drawing for the kids. So this is a different approach with this technology than others.
4.2.2.5 Legal
There are no regulations that would deny the production of this product. But like all toys there are safety regulations and we have to take those into consideration in planning. Regulations: [(Safety)] The difference between Political and Legal aspects are that Political refers to people’s attitudes and approaches and legal factors are laws and regulations. The product must be age proofed and obtain a CE-marking by directive 2009/48/EC Toy safety.
4.2.2.6 Environmental
This can include issues such as limited natural resources, waste disposal and recycling procedures.
The environment is getting more and more attention. Consumers are more aware of their impact and have started buying accordingly. It is advisable to make a product that has a low-impact on the environment and to advertise this.
4.2.3.1 Micro Analysis
Micro environment factors, are factors close to a business that have a direct impact on its business operations and success. Before deciding corporate strategy, businesses should carry out a full analysis of their micro environment.
4.2.3.2 Suppliers
It is important to have good relationships with the material suppliers. It has to be made sure that services of the most reliable and good quality/price related components are used. Because if a supplier provides a poor service this could increase time scales or product quality. The material that is used for the shell, ABS, is very common and can be supplied by a lot of companies. It is a low-cost plastic. The electronic parts are easy to find. Only the VR-shield could cause problems. By making a contract we could solve this dependability and ensure a fixed price.
4.2.3.3 Employees
Employing staff with relevant skills and experience is essential. This process begins at recruitment stage and continues throughout an employee's employment via ongoing training and promotion opportunities. Training and development play a critical role in achieving a competitive edge. If a business employs staff without motivation, skills or experience it will affect customer service and ultimately sales.
4.2.3.4 Shareholders
As organisations require investment to grow, they may decide to raise money by floating on the stock market, i.e., move from private to public ownership. The introduction of public shareholders brings new pressures as public shareholders want a return from the money they have invested in the company. Shareholder pressure to increase profits will affect organisational strategy. Relationships with shareholders need to be managed carefully as rapid short term increases in profit could detrimentally affect the long term success of the business.
4.2.3.5 Competitors
Last but not least the competition. Competitors should be looked at carefully at all times. What they are promoting and what new are they bringing to the market and then working around that to getting the customers to buy your product instead of theirs. Competitor analysis and monitoring is crucial if an organisation is to maintain or improve its position within the market. If a business is unaware of its competitor's activities they will find it very difficult to “beat” their competitors. The market can move very quickly for example through a change in trading conditions, consumer behavior or technological developments. As a business it is important to examine competitors' responses to these changes so that you can maximize the impact of your response.
The biggest competitor for our company has to be Makeblock. They sell a 4-in-1 mDrawbot. [30] This is a drawing robot that can be assembled in different ways. The big difference is that our robot is not a build-kit. It's ready to use and will not take hours to assemble or program. Besides that the price they are asking for the kit is high. Our product will be cheaper. Other competition can be found in different toys brought by major companies. They have a lot of sales power and a known name. Other drawing toys or other robotic toys on the market are our competition. We must try to stand out by advertising effectively and adjusting our price.
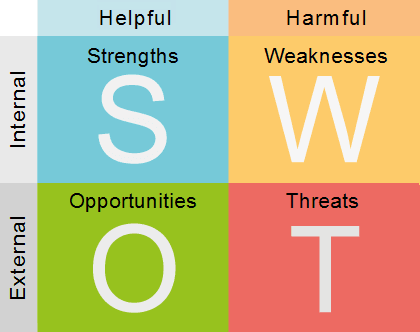
- SWOT Analysis
The SWOT analysis is a tool used for the analysis of a company. It consists of four points: Strengths, Weaknesses, Opportunities and Threats. The first two are internal, analysing the company for its own strengths and weaknesses. The others, opportunities and threats, refer to the current business environment and are so external.
The strengths of the team are innovation, diversity and ambition. The product that is under development is an innovation. There are few similar projects. This is a group of people with different backgrounds. This gives the group an advantage as it has insights in different markets. It is ambitious to prove it's skills and bring this project to a good end. The weaknesses are time and experience. The time given to complete this project is very short. Only a few members of the team have done a similar project. Furthermore the experience with robotics is limited. Fortunately there is good guidance from the teachers.
Opportunities in this project are plenty. The group is following up on a trend in selecting girls as the target audience. There is only a limited existing market for toys strongly linked with technology specifically for girls. There are similar drawing robots on the market, but none with voice control. This is a unique advantage. It also opens another possible market consisting of people with disabilities or injury's. The robot would make it possible for them to draw. The robot market is divided in industrial and service robots. The robot would be a service robot. This market has grown with 11,5 % from 2013 to 2014. [1] Since then it has only enlarged itself. Robots are more and more invading the daily life. They are no longer considered strange or something from the movies.
Threats are seen in the existing companies that sell drawing robots. They are however not very known to the big audience. Besides that there are some existing tutorials on how to make a simple drawing robot yourself. There is a certain skill necessary to be able to build a robot like this yourself, besides the time someone would have to invest. Another threat is other toy companies that sell similar products. These toys could be robotic or drawing related.
- Strategic Objectives
Marketing objectives are goals related to selling your product.
The objectives are simple. We want to find the children who like to get creative when they play. Have interest in new inventions and especially get girls more interested in engineering. This can be done by catching peoples attention and interest towards our product. This is intended to achieve by innovative advertising and introducing the Graphbot as simple and fun as possible. The leaflet is an example of this. [(Leaflet)]
The goal is to get the production up and running by January 2017. The company will start introducing the product in North America, as the market is biggest here. The first goal is to obtain a decent market share (+15%) within the first 3 years. In this same period a second goal is to become a reference brand concerning robotic toys. After 5 years the goal is to be market leader in North America and start to expand the sales to Asia. After penetrating the Asian market the company will expand to Europe. The last goal is to be worldwide available.
- Segmentation
A segmentation of the market divides the market into segments, smaller groups of people with similar profiles. This makes targeting people with the same needs and wishes possible. Segmentation criteria vary for the product and main goal of the company. After segmentation the existing competitors can be easily divided over the market and see which groups they serve best. This enables the team to position the project on a segment that has not yet been spoken for. To fill this gap in the market the team must find the specific needs and wishes of these consumers and anticipate them. Other new products are also easier defined and positioned to fit in the existing market. Segmentation can be done based on demographical, geographical and psychographical aspects.
4.5.1 Demographical
The main target group is girls aged from 6 to 11 years old. The goal is to combat the low proportion of women in technical occupations. A study has shown that more exposure to technology as a child will increase the chances of ending up in a STEM career. [2] Boys are of course not excluded but the main aim remains girls.
4.5.2 Geographical
The biggest share of the robotics market lies in industrial robots. Household robots are however starting to be more common. Think about automatic vacuum cleaners, mowing machines, medical assistance… The consumer-robot market is the fastest growing. Robots are less scary nowadays and will continue to conquer the daily life. Our product will be most successful in North America. The market in the U.S. is expected to grow tremendously.
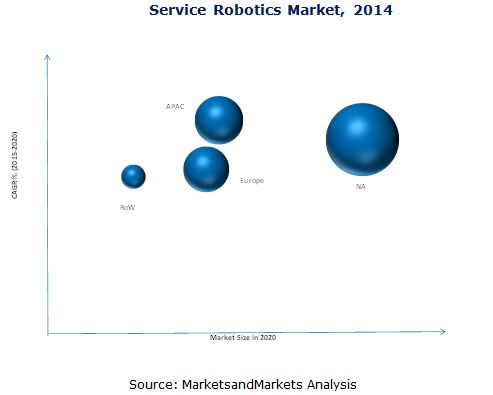
APAC = Asia Pacific NA = North America RoW = Rest of the World
4.5.3 Psychographical
The aim is at a creative user group. Children that love creating things or drawing will be the primary goal. Children that like technology already will also be attracted to the product.
- Strategy/Positioning
A well-positioned company will beat the competition that has a comparable offering. The company that clearly articulates what it does, why it's relevant and how it's different, helps customers make better and faster buying decisions. Market positioning strategy can be based on following points:
- Identify advantages of the brand in relation to competition
- Choosing what to focus on
- Advertising these advantages in the most effective way
We take a look at the SWOT analysis. The team identified the strength of the brand being that it is unique through it's voice recognition controlling. It also opens a market to people who are disabled or with injuries to draw and have fun. But the main focus are young girls.
Pricing strategy research would focus on finding technological toys from the market that already exist and think about the pricing. Will our Graphbot be cheap enough and still entertain the buyers. The ideal pricing position would be there where the market has a gap. This is demonstrated in a picture below. The final price of the product is still to be determined.

- Adapted Marketing-Mix
The adapted marketing mix means one must adjust the elements of the marketing concerning a certain product to reach an international target market. These elements consist of product, price, promotion and placement. Based on research one can adapt these to ensure the best sales in a certain region, such as Asia. Different cultural backgrounds, wages, needs… ask for a different marketing approach. This strategy will achieve a larger market share but in return it will also add to the costs.
4.7.1 Product
A product can be seen as the sum of different components. These components together construct an added value for its consumers and meet certain needs. Components are core values, additional features, look, packaging, service, warranty, size… The product is a robotic drawing toy. Its main features are comprehending voice commands, translating these commands to movement, moving on a surface, changing the pen, detecting the edge of the paper. The product is a drawing robot. It is designed to have two main settings. In the first mode the robot will draw random sketches and serve a pure entertainment function. In the second mode the user can control the robot with his/her voice. One can create images in different colors without having to touch anything. Consumers have the opportunity to draw anything that comes to mind using the robot. Drawing a straight line was never so easy. The figure below shows what the product will look like.
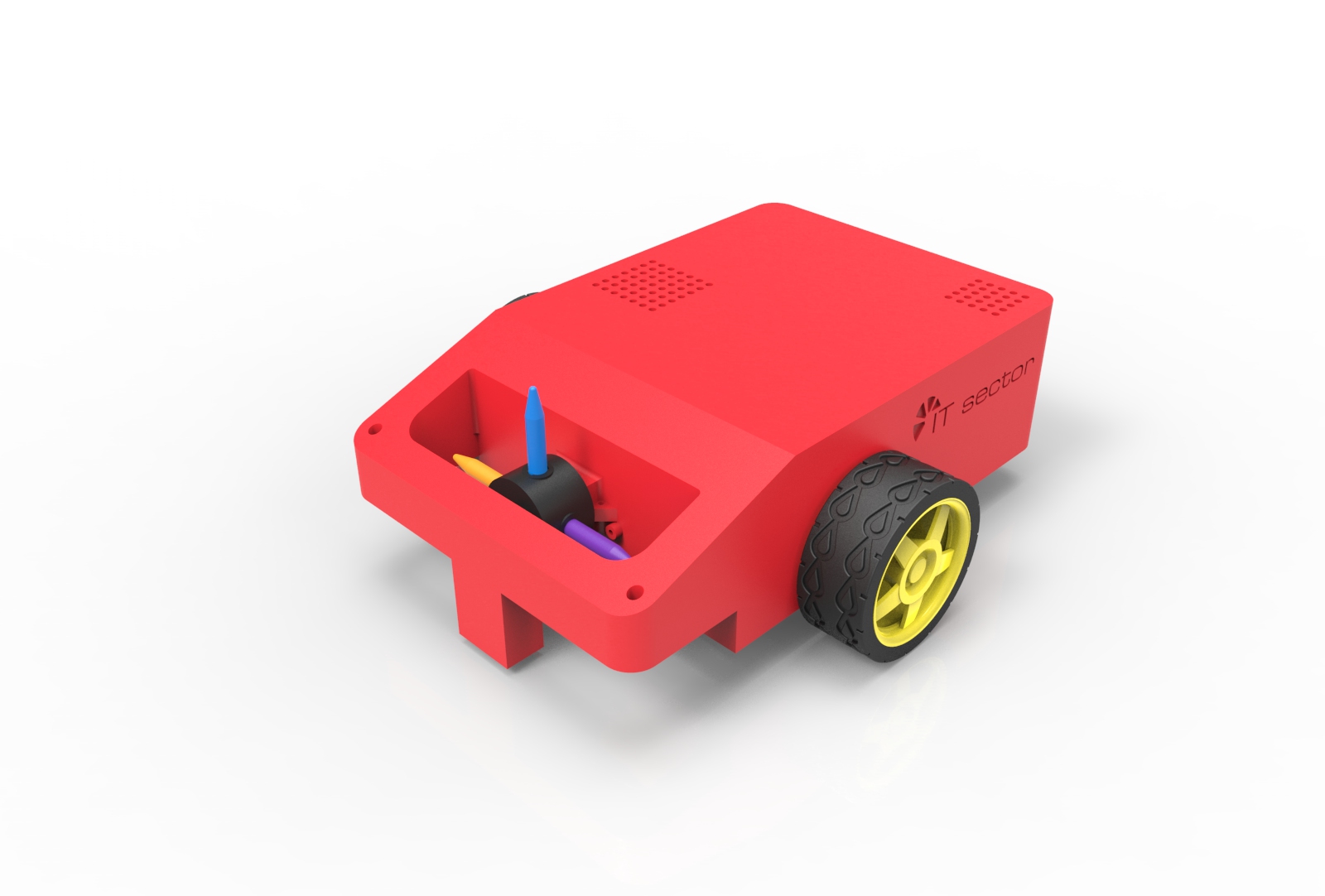
The Graphbot will be available in different colours. It is customizable by choosing your favorite colour and adding stickers.

Below the figure is the logo of the Graphbot. It is meant to depict both the technical as the playfulness of our brand.
4.7.2 Price
The price policy of the product is very important. It has a high impact on how the brand is perceived by the consumers. The team must consider several internal and external factors that influence the price. Internal factors are the marketing objectives, the fixed costs, the variable costs, the marketing strategy. External factors are the nature and demand of the market, the competition, the government policy, the economy, social concerns.
The best strategy for the product is Market Skimming. By setting a high price the team supports the quality image that the team wishes to have. The product should be perceived as educational, creative and of high quality. The development costs will be covered more quickly. After introducing the product to the market, the team will slowly lower the price. When the competitors have picked-up on the product the team can lower the price to ensure the most buyers.
4.7.3 Promotion
Another part of marketing is promotion. How does the team make the target market aware of the existence of the Graphbot? What message do the team wish to send the clients and what is the best method to get the message across? When targeting children it is very important to understand that most likely other people will buy it and not the child self. This is an important thing to keep in mind during the promotion process. This product, regarding its educational purpose, is most suitable to target parents, grandparent, aunts, uncles… The methods to reach people these days are very broad. Most effective is mouth-to-mouth promotion. Print promotion is the second option. Flyers, posters and so on could be very effective as the team can show some of the work. Radio promotion on the other hand will not be very effective. A television commercial could be very effective but costs a lot. On-line marketing will also be very important. The team could organize drawing contests on-line. Promoting the product and challenging the existing customers. This is a new trend called “STATUS TESTS” [(Trend)]. The product already has a page on Facebook [(??)]. The team could organize an on-line community where people exchange tips and show drawings. The product will definitely need a web page. An application that is compatible with (kids-)tablets could also ensure some promotion. Advertisement in magazines for children are also a good method. Direct marketing is another very effective approach. The team could organize events where people can test the product. This would also gain lots of attention. The team could give them the drawing they made with the logo or contact on it to ensure visibility.
4.7.3 Place
The distribution of the product is discussed in this subsection. The distribution policy should be carefully thought through as it has a major impact on the costs. It is obvious that besides on-line direct sales, the team should distribute the product through toy stores. Using indirect Sales has pro's and con's. Two pro's are the capability of mass-distribution and less organizational effort from the teams own company. A negative aspect of this is that the team don't control the sales activity and out dependent on the partners. It is however the best way to reach the target market.
- Budget
As stated before in the Project Management chapter the budget is 150€.
The first step to creating a solid marketing budget is to calculate the current financial situation. If the team works with estimates, the marketing budget will not be realistic.
Understanding the finances starts with organizing the revenue information. It needs to be known how much money the company makes each month and the variations that might exist. Even tough income can vary significantly throughout the year, the team must organize the information based on reliable revenue.
“Reliable revenue” is the minimum amount of money the company makes each month. Lowest monthly revenues should be used because the extra money that is made on another month is not reliable.
After organizing the total reliable revenue that can be expected to earn each month, expenses need to be subtracted. The business expenses can include renting a space, the cost of materials, the cost of paying employees and advertising.
When the amount of disposable income available for the company has been determined, next should determined where the money will go. Marketing is only one area of focus that needs to be incorporated in a budgeting plan.
Divide up the money based on the goals. For example, if the primary goal is attracting clients and hiring is put on hold until the client base is stronger, then more money can be put into the marketing budget.
- Strategy Control
When setting any goals it is very important to also be able to monitor these goals. This is also the case for the marketing goals. One must check if the used strategy has the expected sales result. And if expectations aren't met one must find the cause and try to fix it. These inspections should be planned and reviewed. Most important is to control the efficiency of a certain method. Are the costs worth the benefit we receive from it?
- Conclusion
As we have said our Graphbot is a unique technological toy for children and specifically for girls. There is nothing just like this on the market currently so we have are filling a gap in the market. The Graphbot is a somewhat affordable and interesting toy for children to get creative and hopefully get interested in engineering.
For a long term possibly we can look at possibilities on developing the Graphbot further to get more functions for new models. In order to be the leading manufacturer of these type of technological inventions in the market.
In the next chapter Eco-efficiency Measures for Sustainability you will find information on how sustainable we are in manufacturing the Graphbot.
- Eco-efficiency Measures for Sustainability
- Introduction
The use of sustainability generates value in technology and process changes whilst reducing resource use and environmental impact of the product during its life. Sustainability applies to all aspects of the project, from purchasing and production to marketing and distribution. Linking environmental and economic performance, sustainability is the first management concept. Implementing sustainability measures gives the team a greater understanding of activities to create the prototype. It is profitable to use the eco-efficiency principles during the project as they minimize lot of resources, energy, waste, improve production methods, develop new products and use existing materials.[21]
The main issues of sustainability in the project are:
- To use low cost materials in small quantities
- Choosing the best solutions of components to achieve the prototype
- Using recycle materials like rubber and plastic
- To implement a Life Cycle Analysis
The aspects which are discussed in this project are:
- Environmental
- Social
- Economical
- Environmental
The environment must be maintained by everyone. It should be kept as clean as possible. To achieve that in this project, the team must be careful regarding the materials it is going to use and the quantity of these materials. It is necessary to know which material it is useful than others. This is an important detail to remember when thinking how it gonna be the 3D model. The prototype mustn’t be very heavy for a good functionality of DC motors. In this project the team should use materials that can be recycled, e.g. plastic and rubber. If the team pays a little attention to conscientious saving energy, the project could be a sustainable one. Using a rechargeable battery it is a sustainable manner because the user shouldn’t change every time the battery, they just have to put it on charging.[15]
Mobile robots are still a challenge for each engineer. The mobile robotics field is a young. In it roots it includes many branches of engineering like mechanical, electrical, electronic and industrial design. Each of these fields are shared by all the team members. If you have a great knowledge about electronic and electrical fields, it can be avoided any issue regarding of burning the electronic parts or to replace the faulty components, if the team pay attention at this aspect, the work will be easyer [(Siegwart)].
Below the advantages and disadvantages of the proposed material choices are explained. Wood has many advantages and disadvantages as an engineering material. Firstly, wood is an environmentally friendly material and it is a renewable. Also, it has a high specific strength, that could be useful for the robot. Everyone knows as well that wood is not electrically and thermal conductive and that is not good because it works with electronic components. The team has however decided to not use wood because wood can not be used at high temperatures. It is highly inflammable and whenever a short circuit happens of electronic components the risk to burn is high. Nobody wants something wrong to happen to the costumers [(BlewittJ)].
As a second choice glass fiber could be used for the casing. Glass fiber has a high temperature resistance and is non flammable. It has a high resistance of corrosion. The disadvantages are: it is brittle, weak abrasive-resistance. It is also expensive, that is why the team has decided to not use it.
The cork, like wood, it is an environmentally friendly material and cork extraction process does not harm trees. It can be installed on uneven surfaces. The great dissadvantage is that any sharp object can punctuate or damage cork flooring surfaces. It has high costs as well. This is the reason why cork will not be used in this project.[(Cork)]
The best choice is a plastic casing. In this project the team has decided to use plastic (ABS) because it can be easily moulded, has high durability and is recyclable. The team aslo has access to a 3D printer to create any shape that might be necessary. These are the reasons that the team has chosen plastic as a material.
It is important for the environment to save energy. The reader can find a discussion about energy conservation below. This means to decrease energy consumption by using less of electrical energy. For example, if the team would use the technology of solar panels instead of the battery, it will save the energy. Unfortunatly the costs will be quite different. They will be a lot higher. Even if energy conservation reduces energy services, it can result in an increased environmental quality. It is at the top of the sustainable energy hierarchy [17]. Preventing future resource depletion can reduce energy costs as well. In the result of the teams calculations, using 7.4 V lithium ion battery will enable the robot to work only for a limited period of time. By implement technology with solar panels the time would be limited to the sunlight. Resulting in a much longer usage period. The cost will be higher to achieve that, but the customers will not have to change batteries so often.
It is important for the costumers to know how to use the Graphbot. The team will provide a user manual for this prototype. This will ensure that the customers use the Graphbot in a safe manner. Avoiding to overload the robot, because the risk of overheating and damaging exists. Therefore the team must carefully evaluate the choice of casing material.
- Economical
The economic aspect of sustainable development can be seen as part of teaching and everyday during of the project. The greatest potential of this project it is creating a prototype which must be liked by users, also to learn principles of economy it become conscious to do what it want in the project. Economic and ecological sustainability in the classroom they may well support each other. For example, to decrease raw material or energy consumption is ecological and economical way to do sustainable action. Economical labels give information on low economical impacts of this product at the moment. The target of sustainability courses of these classroom is to teach how it should to identify the issues of these principles, attitudes and values, habits of consumption. It should to learn how to recognise motives behind advertising and it should to be able of interpreting, analysing and observing advertisements and other commercial messages in a critical way.[ [(SoederbaumP)].
Robotics nowadays has achieved a great success thanks to the engineering world. With this project the team builds on the developement of robotics. This raises the standards to deliver a proper prototype. Robots are the future and this project can help the reader to work further in this field. The project builds on and enables more applications in the robotic domain [(Siegwart)].
- Social
Social sustainability is important to meet customer needs and the goals of the Graphbot is to achieve this thing. It believe that the customers opinions are useful to develop this prototype and to increase the number of customers satisfied by the product it want to take a sounding of point of view which will contain the questions regarding of the product, and through that it mean the quality and what improvements should be made. The customers can contact on this Facebook page: 'https://www.facebook.com/Graphbot1/?fref=ts' and to improve the prototype is important clients feedback.
The product is addressed to certain types of customers such as families with children. It want to attract more children to be passionate about technology and his creation, so if children will be attracted of this product in the future, they will be passionate about electronic parts which it has been built this project. The success depends very much by the customer satisfaction, and customer satisfaction is the motivation to improve the competences in engineering as high as possible and to bring improvements to the product which we conceive it. To do that, it is going to develop the communication skills with the costumers so that this project will be sustainable from social point of view. Because it has a limited budget, it need to brainstorm about a starting price of Graphbot to be accessible for everyone.
Social relations should not be established only between team members and customer, it must keep good relations with the local providers, so it has decided to operate with local suppliers, because the electronic components will reach us in time quickly and it's very important to save time.
Other type of social relations is between team members. It must to avoid any kind of misunderstanding and to keep a good relation because it is important to work together to achieve this project like a team.
- Life Cycle Analysis
To cover all issues regarding sustainability, the team must implement a Life Cycle Analysis. This chapter is going to analyse the whole product from creation to recycling. This analysis should start with the first stage. The first stage focuses on raw materials. The product is formed by electronic parts, chassis, wheels, pens and mechanical parts. All these components must be bought from Portuguese providers. The team must pay attention to the balance between quality and price. It has been decided to try to use low cost materials in small quantity.[(ISO)]
Design process
The next step is about the design process. First of all, the members should draw the robot and try to create a unique design. The goal is to try to use less material because this robot should be light enough for children. It should have an appealing appearance to be attractive for kids. There are considerations about the use of two choice of colour (one for boy and other one for girl). All the design processes are mainly done by 3D software because it is easier to see on the computer what the Graphbot model will look like.
Manufacturing and assembly
Let it go further and discuss the manufacturing. The term may refer to a range of human activity which is called teamwork. In this phase the team must think about how to assemble all components to achieve the final product. Assembly is the last phase before packaging. One must consider the connections of all electronic components. The product can not get damaged during transport or when the children shake it.
Packaging
In the next phase the packaging of the product is discussed. The product will be send to the costumers or to the stores. One must consider carefully how the final product will be packaged in order to be transported safety. To achieve this the team will use cardboards to package it. The robot is put in protection foil to avoid being scratched. And as mentioned before the robot will come with a manual for the user.
Use the product
Finally, the life of the final product depends on the intensity of usage. In fact, this product is a toy for children. They only need a few voice commands like forward and backward to start playing. The use will be mentioned in the user manual. This step in the life of the graphbot is important. If the costumer does not follow the correct instructions of the manual the graphbot will not work properly.
End of life
In the end of the life of the product, it should to be recycled. Once the users decides that the robot is faulty, they can try to fix the damaged components or try to replace the faulty component. It is better than having to buy a new graphbot. It is more sustainable to buy a new electronic part from a local provider and bring the damaged part to be recycled. If the product is still under warranty, it could be send back to the factory and repaired there.
- Conclusion
This project can be a sustainable project. To build this prototype the team will use low cost materials in small quantities. Nonetheless the final product will be amazing and can be attractive. If the robot has a wooden casing it would be more sustainable, safety measures prohibite this. In the next version of this project one can implement the solar panels instead of the battery. In this version the robot will have a rechargeable battery.
- Ethical and Deontological Concerns
- Introduction
Ethical concerns are problems which may arise that require a person or organization to choose between options which can be considered right or wrong in terms of how it affects people. Deontological concerns are similar in the way that they are defined by the morality of a choice by a person or organization over their duty to carry out specific actions. Both of these fields must be considered for every decision made by the team throughout the development of the project.
If each of these factors is considered throughout the process and carried out correctly, then the group can create and market a product which is attractive to customers. There are 5 main areas involved in the process of our project in terms of ethical and deontological concerns, and these are:
- Engineering ethics
- Sales and Marketing ethics
- Academic ethics
- Environmental ethics
- Liability
Each of these sections includes many different humanitarian and economic variables which must be taken into consideration when making decisions.
- Engineering Ethics
Of all of the categories that are covered in the ethics topic, Engineering ethics is probably the most important and relative in terms of the project that we are creating and has the most effect on the public and their lives. All engineers and workers in related fields must ensure that their work is safe and complies with all health and safety standards related to their country.
Engineers are expected to fulfil these 4 acts when carrying out and planning tasks according to the Code of Ethics from the National Society of Professional Engineers[(NSPECodeOfEthics)]:
- Ensure the highest level of safety, health and welfare of the public remains intact.
- Perform tasks only in which they are qualified to carry out.
- Carry out tasks set by employers or clients to the best of their ability.
- Carry out tasks set in a responsible, ethical, lawful and honourable manner to ensure the reputation of the profession is heightened.
Each one of these acts has several rules which engineers and employees in related fields must abide by which can guide them to being ethical and lawful in every task they carry out.
Each member of the team contributed to the project in the specific fields as each member is most experienced within them and are comfortable working with the materials. This allowed the group to carry out the tasks set by the customer to the best of each person's ability to ensure they are happy with the final product whilst also sticking to the guidelines set for the team.
In the project, the group had to ensure that the safety of everyone involved was of paramount importance when performing every task such as designing, building and testing our robot. Whenever the client or customer required something to be altered within the project either before or during the process, the team had to do it's best to accommodate their needs but also inform them if the team thought it was not possible or there was a simpler, more effective way to achieve the same outcome.
- Sales and Marketing Ethics
Within the sales & marketing section, there are six main categories in which ethical reasoning should be applied[(Markgraf)].
The first of these sections is the first step that should be taken in the marketing process which is research. The customers’ details from the research stage must be kept private and destroyed when not needed. Also, when researching other products, it is vital that none of the ideas or designs from previous products are used within the project as that would be plagiarising.
The professional conduct between the group and the customer must be performed in an ethical manner. Honest and respectful interactions must take place with the customer or client to ensure that they are receiving the product that they agreed to pay for.
In terms of competition within the market sector in which the product is placed, the group must be ethical in the way that it promotes fair competition and fulfilling the obligations towards the team's competitors and customers in good faith.
Probably the most important aspect of the sales and marketing ethics subject for the customer is that of pricing. The team must, when deciding on a price for our product, select a price which will give the group a profit but also will give the customer a sense of value for their purchase. As this product is aimed at children, it is very unlikely that they will purchase this product for themselves, therefore their parents will be the ones who decide to buy the product so the overall product must give a sense of value to them as well as their children.
For the product that the project produces, the team must ensure that it is safe to use for it's intended use. A set of instructions for the intended use of the product must also be provided to the customer to help them make the product function correctly.
Once the product has been created, the promotion of the product can begin. The product must be promoted honestly with no misleading statements or promises and only be promoted by highlighting the product's strengths and benefits to the customer.
- Academic Ethics
Academic ethics is the ethical code present in the field of Academic study. There are several fields within the ethics of Academia which include;
- The maintenance of Academic standards within a business or institution.
- The avoidance of cheating and plagiarism.
The definition of plagiarism is intentionally or unintentionally using someone else's work or thoughts without reference to the original author. The definition of cheating is attempting to present as someone's own work that one has not created by the person who is required to carry out the task or using improper means to pass an examination [(PineManorCollege)].
To prevent the team being accused of cheating or plagiarism, the group as a whole had to all make sure that when researching ideas for the product, nobody directly copied another idea that had already been put into practice or to the market. The aim is to be as original as possible when developing every stage of the project and product so that the product is able to stand out from it's competitors.
- Environmental Ethics
The subject of Environmental ethics refers to the relationship between human beings and the natural environment [(Rinkesh)]. The issues that have been reported in the media worldwide in the past few decades are that of pollution of the air we breathe and the water in which our fellow creatures live due to the rise in global population, and the rapid depletion of the natural resources we use to power our planet [(Cochrane)].
For the project, the team will do it's utmost to ensure that we minimise the pollution levels when designing and creating the product. The team will also attempt to reuse as many materials as possible to construct the robot to reduce the need for companies to create new components for projects such as this. In terms of the packaging for the product, the team will attempt to create a fully recyclable design which will also be attractive for the customer. For the base of the structure, plastic will be used as it is 100% recyclable and therefore very sustainable for the environment.
The directive that must be followed in order to ensure the safety of the customer is that of Restriction of the use of certain Hazardous Substances(ROHS). This directive states that several hazardous substances are forbidden in the manufacturing of electronic and electrical components that may be used in the product.
- Liability
The last but not least of all of the categories of ethics is that of liability. Liability can be described as someone's responsibility for their acts or omissions which are against the law in in certain countries and also comes into effect in the instance that a member of the public's health or property is damaged by a company's actions or products.
In light of this, the group must make sure that it takes care of everyone's health and welfare that are involved in the process of the project including:
- Group members
- Customers
- Supervisors
There are three types of liability which the team must take into consideration throughout our project which are Civil, Criminal and Professional liability. These are used to ensure that the children using the product cannot be harmed so the robot had to have no sharp edges or small loose pieces that the children could harm themselves with. The professional liability was the team's responsibility and had to make sure that everyone in the group and involved in the process was safe when designing, creating and testing the product.
For the robotic art project, there are four directives which the team must comply with to make sure that every section of the planning, designing, constructing, testing and delivering the product to the customer. These four directives are as follows:
- Machine (2006/42/CE 2006‐05‐17), which applies to machinery, interchangeable equipment, safety components, lifting accessories, chains, ropes and partly completed machinery.
- Electromagnetic Compatibility (2004/108/EC 2004-12-15), which regulates the electromagnetic compatibility of the equipment by ensuring the internal market functions by making sure that the equipment being used meets the required level of electromagnetic compatibility.
- Low Voltage (2014/35/EU 2016-04-20), which refers to guidelines relating to electrical equipment which operates between 50 V and 1500 V.
- Radio Equipment (2014/53/EU 2014-04-16), which establishes guidelines for putting into service and on the market in the Union of radio equipment.
- Conclusion
After taking into account all aspects of ethics and deontology, the group as a whole now have a much clearer and broader perspective on how decision making and the people involved with creating the finished product, especially the customer or client are dealt with. The directives given in the specification that are to be followed have given a guideline on how to conduct throughout the process of project. Each of the sections applies to everyone in the team including Engineering, Sales and Marketing, Academic, Environmental and liability ethics so the team is aiming for a common goal. If all of these aspects are adhered to, then the drawing robot that is created will be able to go on the market without any problems.
- Project Development
- Introduction
Here team progress is presented, regarding development of a prototype. The design process described here gives the reader a quick insight in how the team conceived a solution for the given problem. A lot of brainstorms and weighing advantages and disadvantages has been done.
- Blackbox
The blackbox is a rough diagram describing the main functions of the robot. This diagram is presented in figure 11.
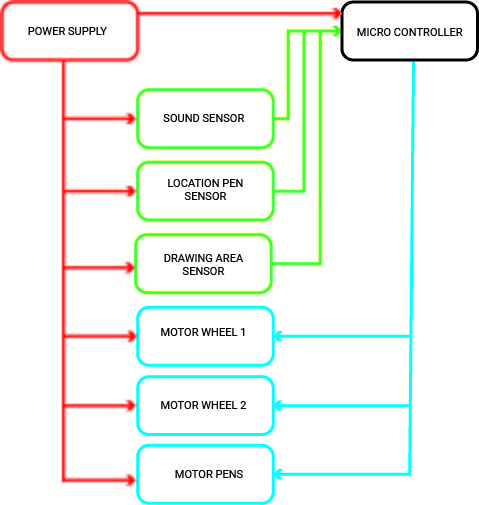
The power supply (red) is connected to every other component. They all need power in order to work. The sensors input (green) is connected to the micro controller. In the micro controller the data from the different input sensors is processed. The result of this data is translated to commands for the output (blue). So for example if someone says 'forward' the sound sensor will pick this up. It will send a signal to the micro controller. This signal will be translated and the micro controller will signal both motor wheel 1 and motor wheel 2 to start working.
- Structural Drafts and System Diagram
This paragraph presents solutions, which the team had come up with for the different design challenges.
To enable our robot to change colours.
The robot changes color if given this command. The team have decided to work with pens or markers with different colours, to give the end user possibility to collect them. The pens have to be placed on and off the paper. In the blackbox diagram 11 this is described as the motor for pens.
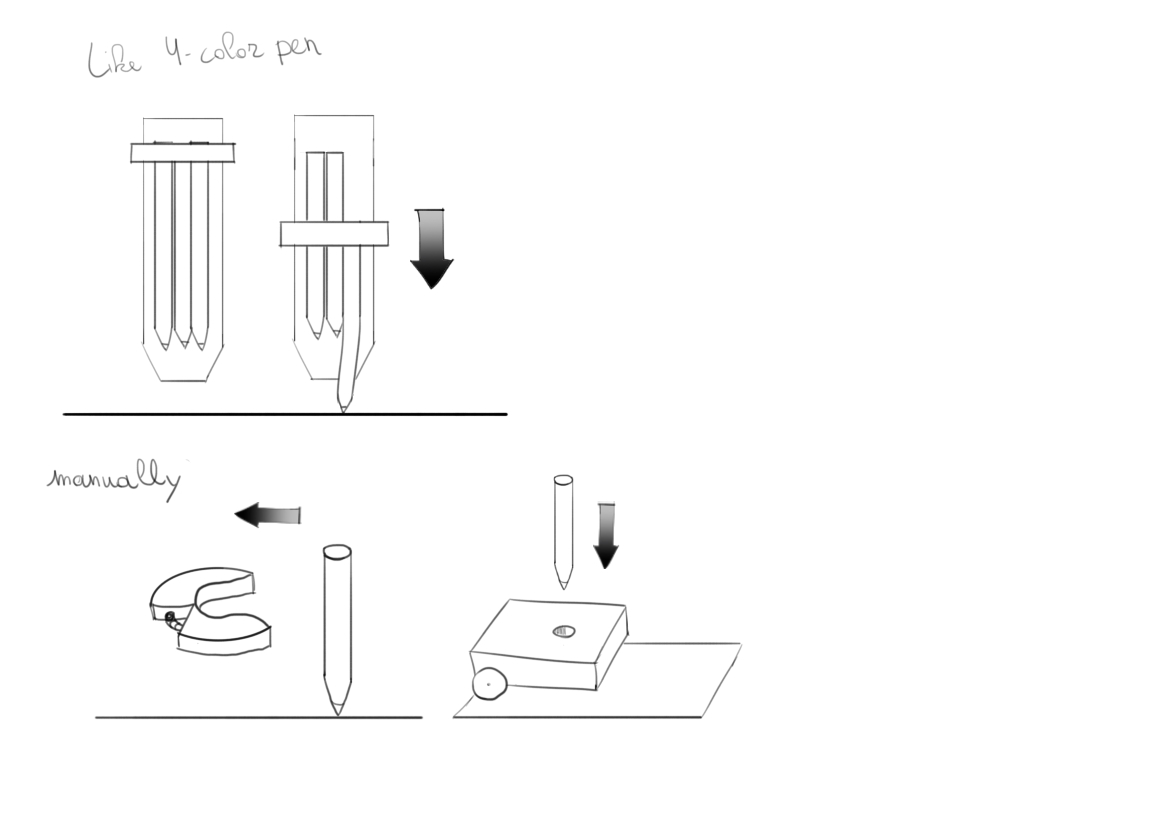
The first option seen in Figure 12 is switching the pens the same way as the existing four colour pen. The pens would have to be bendable. Besides that the team could also choose to change the pens manually by attaching them to a clamping system. This is an easy solution, but also quite boring, so the idea was dropped without any sketches.
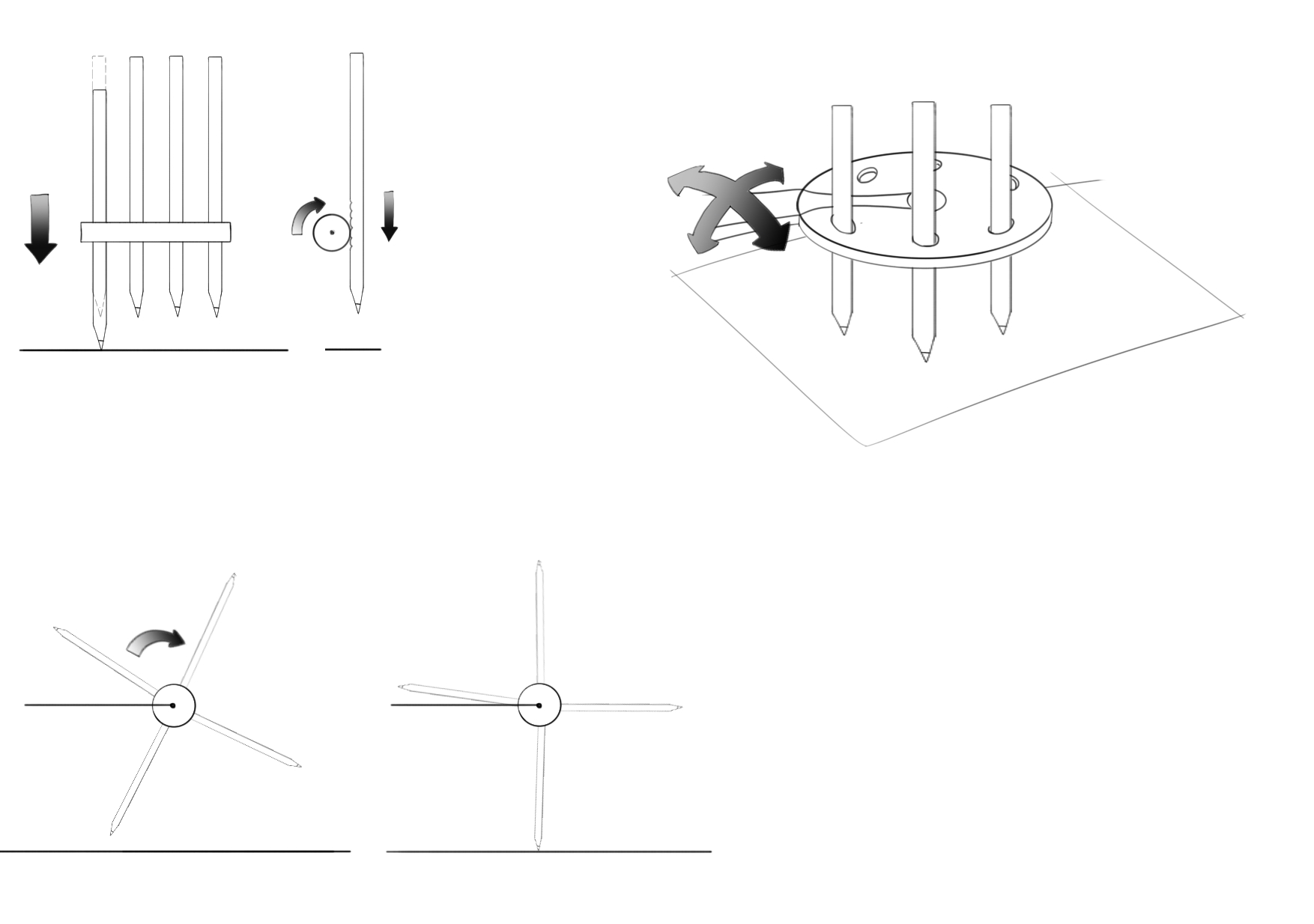
Another method visible in Figure 13 would be to have every pen rolled down at its turn. It would require at least one motor for every pen. Then the team could also attach the pens to a system that can rotate in every direction. This would be difficult because it is obligatory to get every pen to touch the paper at a goof angle. The last option is a wheel with different pens on rotating to switch the pen. It would only require one motor.
| Method Number | Description | Advantage | Disadvantage |
|---|---|---|---|
| 1 | 4 colour pen | It already exists, so it certainly works. | It's hard to implement. The pens have to be bendable. |
| 2 | Clamping system | Easy and cheap | Boring |
| 3 | Roll the pens down | Straightforward | It would need 4 motors |
| 4 | Rotating system | Looks cool | Hard to ensure the right angle on the paper |
| 5 | Wheel | Innovative | Hard to ensure tight pen pressure on the paper |
Regarding provided advantages and disadvantages, the decision was taken to choose 4th method, described in table 9
Type of wheels
Here it is discussed which type of wheels would be most suitable for a Graphbot product. In the blackbox diagram shown in Figure 11 this is described as motor wheel 1 and 2.
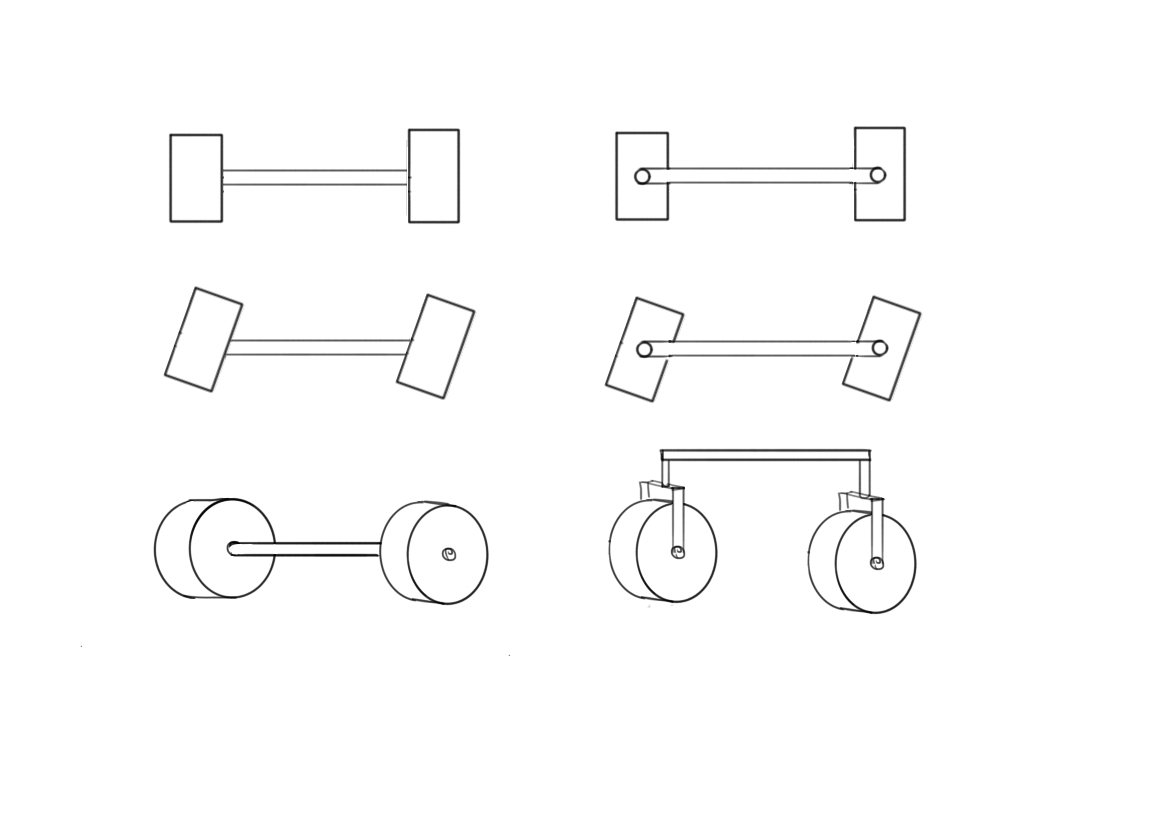
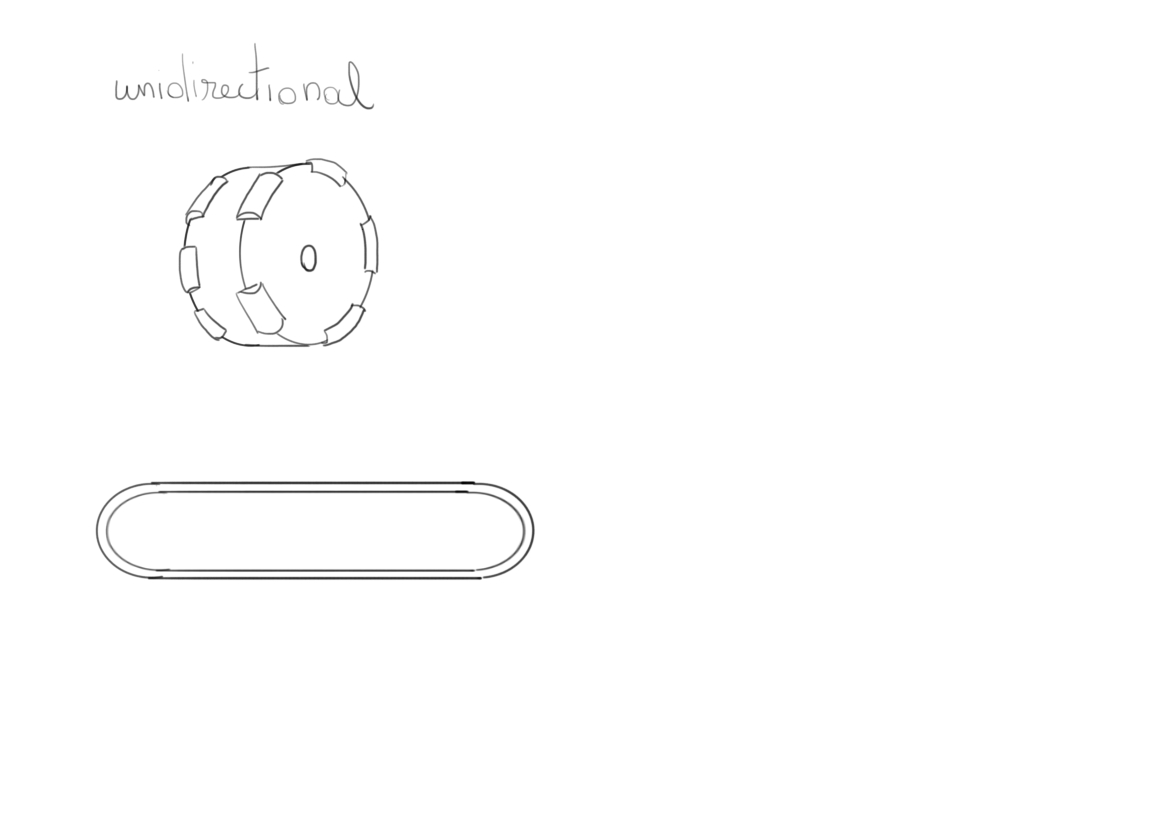
It has been decided to use the first type of wheels, visible on Figure 14. Unidirectional wheels, visible on Figure 15 are too expensive and caterpillars are hard to turn.
- Structural Drawings
The robot has three wheels. Two are connected to a motor, the other is merely there for balance. The infrared sensor is place at the front side to detect the edge of the paper. The wheel with pens on is the system to change colors. It is connected to a stepper motor and by rotating it a different colour will touch the sheet of paper. It is visible here 16
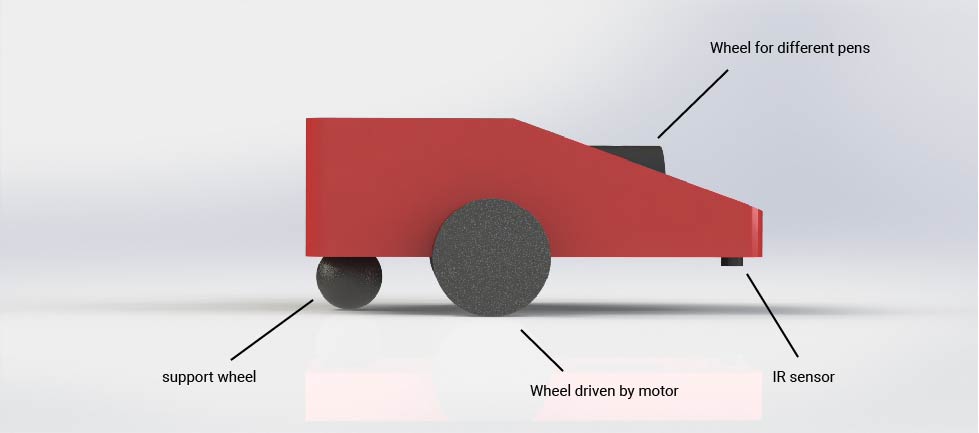


To secure the different colors to the wheel there is a turning mechanism in the penholder, as shown here 17
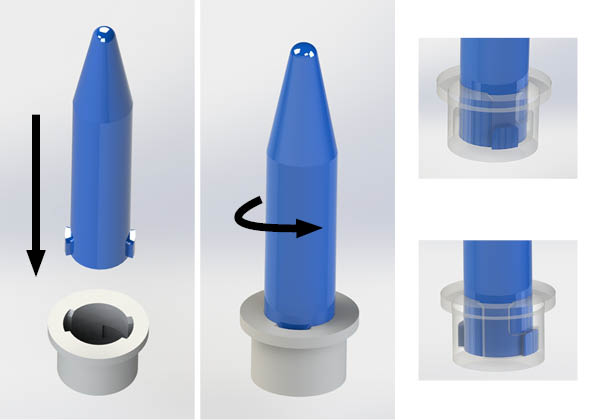
To ensure the right amount of pressure while drawing there is a spring attached to the penholder. This will push the pen against the paper. This wheel with pens on is connected to the stepper motor. The motor which has been chosen has a flattened shaft and this fits into the wheel, as shown here 18
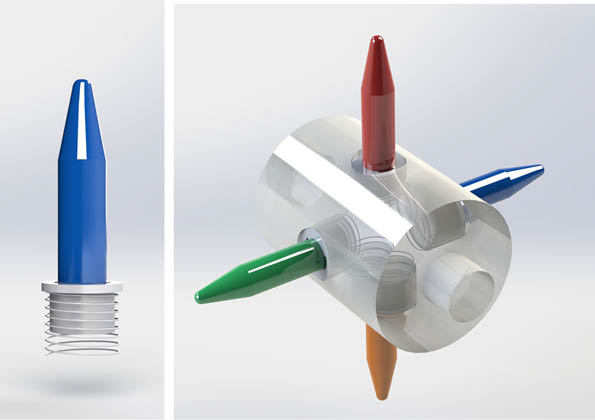

For the support wheel a simple universal wheel has been chosen, visible here 19

After finding the right components and editing the 3D model to fit them, this is a new version of the Graphbot.

- Architecture
To begin with Architecture of the project, handmade cardboard is presented on a figure 21 , showing future design of a Graphbot.

- System Schematics
The breadboard, schematic, and PCB diagrams all show all of the electronic components that will be used in the construction of the Graphbot and how each component will be connected to allow the robot to function correctly. The program that was used to create these diagrams was fritzing, although using this program caused some difficulties the final results were achieved to give a visual idea of how the electrical components should be connected. The 5 V stepper motor is used to control the colour change of the pens in the Graphbot as it allows the pen wheel to rotate by a specific angle. The 7.4 V 900 mAh battery is being used as it allows the team to power all of the components that are being used when they are needed, although the battery in the diagram displays 9 V the real value of the battery is 7.4 V. The L293D that is placed on the breadboard is attached to the motor shield and will control all three of the motors that will be used in the Graphbot. In the case that the Graphbot reaches the edge of the paper, the IR sensor on the bottom left of the breadboard will detect when the nose of the robot reaches the edge paper and give a signal to the motors to tell them to stop. The microphone that is connected to the Easy VR shield is used to receive the input to the system from the user. These micro-controllers can then be connected to a PC to allow the programming of the the components to carry out specific tasks within the Graphbot. A loudspeaker has also been used to give the user some feedback before performing the action. A switch is also being used to be able to turn the robot on and off at the user's wish.



- Components
Here list of all components is provided, with all the calculations done. Proposed 9 V battery for this schematics will be enough to carry on the Robot for 20 minutes. This is not sufficient. Another 7.4 V battery with better specifications will be used.
In next sub chapters, Tables comparing different components will be shown.
- Single-board micro controller
It has been decided to use an Arduino board because the team has some experience using and programming those micro controller . Besides this team members had participated in a crash course at ISEP on how to use Arduino.
From the available different Arduino boards Arduino Uno R3 has been chosen. This micro controller“ meets the requirements indicated by team calculations.
-Stepper motors
Stepper motor is needed in order to change the pen used by our robot. The stepper motor should have a voltage lower then 7 V in order to work in project configuration. The last stepper motor fits this. Although the resolution of this stepper motor is lower it is still sufficient. Here is provided a comparison table 10
| Name | Price (€) | Rated Current (A) | Rated Voltage (V) | Stride Angle (º) |
|---|---|---|---|---|
| Small Stepper Motor | 6 | 0.40 | 12 | 7.5 |
| Stepper Motor with Cable | 13 | 0.33 | 12 | 1.8 |
| Small Reduction Stepper Motor | 6.46 | 0.40 | 5 | 11.25 |
Infrared sensor
The infrared sensor is used to detect the end of the drawing area e.g. the sheet of white paper, by calculation the amount of a reflected light. To follow the requirement of our project, the simplest IR sensor is enough to meet up the guidelines, comparison included here in table 11
| Name | Price (€) | Rated Current (mA) | Rated Voltage (V) | Link |
|---|---|---|---|---|
| Infrared Line Tracker Sensor | 10.90 | 17 | 5.0 | http://www.botnroll.com/en/infrared/798-infrared-line-tracker-sensor.html?search_query=infrared+sensor&results=31 |
| QRE1113 Line Sensor Breakout - Analog | 3.00 | 17 | 3.3 - 5.0 | http://www.botnroll.com/en/infrared/370-sensor-de-linha-analogico-qre113.html |
| QTR-1A Reflectance Sensor (2-Pack) | 3.72 | 17 | 5.0 | https://www.pololu.com/product/2458 |
We considered using a servo motor to lift the pen changing colour mechanism up and down. Unfortunately adding this would exceed our budget. The benefits would be enabling our robot to change colours more smoothly and using the robot without drawing on a surface. Moving the robot without drawing can also be achieved by only partially turning the stepper motor or not attaching one of the pens. To give the user some feedback the team considered using the speakers on the VR-shield. This feature would use a lot of the battery but be very user friendly. The user can communicate in a direct manner with the robot. Besides that red and green LED's could be used to provide the user feedback. This would be better for the battery but harder for the user to understand. The chassis for the drawing robot will be 3D printed. For actual manufacturing molds should be made and through injection molding the casing for the Graphbot can be made.
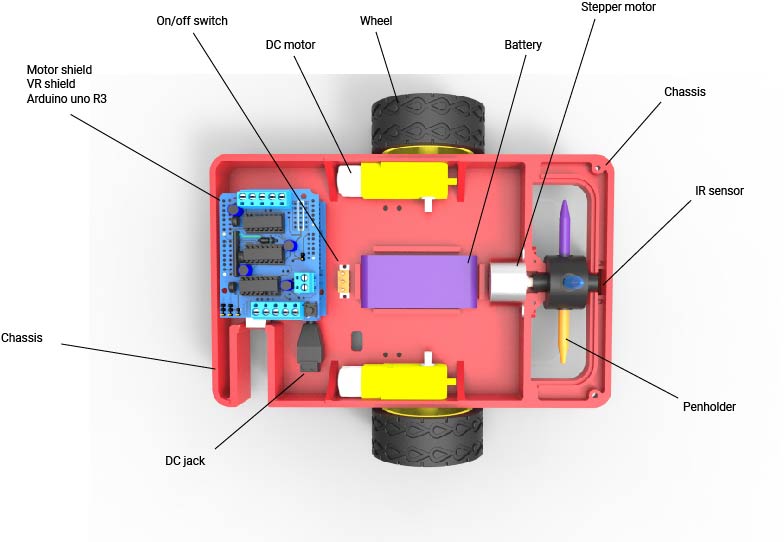
This figure 25 shows how some components are placed in the Graphbot. The cables, PCB, speaker and microphone are not visible on this picture. The PCB will be attached to the upper part of the casing. On this the microphone and speaker will be placed as well as the needed resistors and cables to connect everything. As you can see the ardiuno, VR-shield and motor shield are placed on top of each other. The connection from the arduino to a computer is accessible. This enables the user to update or modify the functionalities. The battery is placed in the center of the robot and is accessible for charging through the bottom. The DC jack is used to connect the arduino to the battery. The DC motors are at the sides and connected to the wheels. The stepper motor is used to turn the wheel where the pens are attached. The IR sensor is placed at the front of the robot. This will enable the robot to detect the edge of the paper. A caster ball is placed underneath the rear of the robot for extra support.
- Functionalities
Regarding the project development, it was figured out that our Drawbot has to obtained the following functionalities, in order to work properly, according to the guidelines and requirements.
List of Functionalities
- Recognise a following voice commands: “Start”, “Stop”, “Up”, “Down”, “Left”, “Down”, “Change”
- Recognise a white paper area surrounded by black paper
- Move on a plane
- Change colours
- Start / Stop to work
- EasyVR Shield Preparation
In order to take a benefit from obtained EasyVr shield, some additional steps have to be performed. In the beginning, additional software and libraries have to be downloaded. First it is compulsory to download EasyVR Commander and EasyVr Arduino Library in the newest available versions, from the webpage http://www.veear.eu/downloads/

Follow these few steps to start playing with your EasyVR Shield and Arduino
- Insert the EasyVR Shield on top of your Arduino board
- If you want audio output, either wire an 8Ω speaker into the screw terminals (J10) or connect headphones to the 3.5mm output jack (J9)
- Connect the supplied microphone to the MIC IN (J11) connector
- Install the EasyVR Arduino libraries on your PC
- Connect your Arduino board to your PC via USB.
- Set the jumper (J12) in the SW position
- Open the example sketch TestEasyVR from your IDE menu “File” > “Examples” > “EasyVR”
- Upload the sketch and open the “Serial Monitor” window
- See comments on top of the sketch for usage details
- Disconnect Arduino from PC
- Make sure the jumper (J12) is in the PC position
- Open the EasyVR Commander and connect to the Arduino serial port
- After connection Arduno, go to the “Group 1”
- It is compulsory to prepare user recognition voice samples, in particular order
- Click Add command button
- Name command UP
- Click Train command button
- Record voice sample
- Click Add command button
- Name command DOWN
- Click Train command button
- Record voice sample
- Click Add command button
- Name command LEFT
- Click Train command button
- Record voice sample
- Click Add command button
- Name command RIGHT
- Click Train command button
- Record voice sample
- Click Add command button
- Name command SPIN
- Click Train command button
- Record voice sample
- To prepare user custom voice feedback, follow company attached PDF instruction http://www.veear.eu/files/EasyVR-User-Manual.pdf Page 61 ¨Using Custom Data - Sound Table¨ and then ¨Updating Custom Data ¨ Page 63
- Disconnect Arduino
- Set the jumper (J12) in the SW position
- Upload Arduino Code.
- Disconnect Arduino
- Set the jumper (J12) in the HW position; robot will be working only it this mode
- Now shield is ready to use.
- Tests and Results
- Human tests
As it is mentioned in introduction part, our first test procedure was a Human Test. One team member has been pretending to be a robot and in the same tame second one was giving random voice commands.
We have used the floor as a drawing area, with previously drawn boundaries using a white chock. The test procedure is available here 27 and the results are provided here 28


- Component testing
As the team were proceeding with the project development, further tests were been performed to ensure that each part of the robot performed the way that was expected of it.
Regarding the main functions of the robot, the most important test was Voice Recognition. The team firstly connected the speaker to make sure that it worked properly, then the team attempted to play various sounds through the speaker to prove that the speaker was fully functioning. The next step was to use the pre-programmed voice command 'robot' to make sure that the robot could recognize the sound input.
The EasyVR has been programmed to recognize 5 commands: “FORWARD, DOWN, LEFT, RIGHT, CHANGE”. After that one of the team members has been speaking to the shield and it worked successfully with the speaker giving positive feedback.
After that, the next stage was the Motor Shield testing. The team has achieved to control the 2 DC motors and the stepper motor in the way that was expected which was the wheels that are connected to the DC motor were rotating while the stepper motor was able to rotate at a specific angle.
The next step was combining voice commands with enabling particular motors, the team encountered a problem at the start when the current from the USB was too low but the team attached an external power supply which allowed the system to function.
Then the team tested the IR sensor itself and it worked correctly. When a white sheet of paper was close to the sensor, the value given was around 40 while the value given when close to a black surface was almost 1000. Thanks to this the robot is able to detect the edge of the paper when in use.
Another difficulty that the team faced was when testing the IR sensor with the robot, the cable from the IR sensor to the Arduino lost connection and when reconnected the Arduino would not function correctly. To try to overcome this problem, the team attempted to upload the new bootloader and change the faulty processor in the Arduino but this proved unsuccessful.
The teams current prototype can be seen in Figure 29

- Project development
After obtaining the new Arduino board for the team, project development has been continued. To work around the cable connectivity problems, the extension pins have been soldered on to the Motor Shield, as well as to the IR sensor. To connect the IR to the robot, the team have used female - female connectors that are attached to the cables. The next step was soldering the Switch ON - OFF, between the battery and Arduino, to be able to turn the device on and off. Further phase in the development was soldering cables to the DC motors and preparing the pins for proper Arduino connection. After assembling all the part together, and updating the code, the Graphbot has started to work properly. Properly working means that after turning on the Graphbot and system initialization, the user can hear “beep” sound, meaning shield is waiting for voice command. Time limit for voice recognition is set down to 5 seconds. After that the user can hear another ‘’beep’’, meaning that the Robot waits for further commands. While waiting for a voice command, simultaneously the IR sensor receives the value of reflected light from the surface. If this value exceeds 900, it means that the robot entered black surface and DC motors stop functioning. When the Robot hears a command to go forward, first the IR value is checked. If it is less than 900, meaning it remains on a white surface, the Robot is allowed to start moving forward. When the robot turns left, the left wheel is turned on to move forward and the right one is turned backwards simultaneously, both only for 0.3 seconds and after that they turn off. It allows to rotate the Robot about 90 degrees. The same applies when turning right but the motion is the opposite. Backward command causes that the Robot first starts to move backward, then IR value is checked. If it remains on the white surface, movement continues. If not, the DC motors are disabled. When user gives a command to change the color, stepper motor receives a signal to perform rotation from its current position to 500 micro steps forward, which gives a 90-degree rotation. This operation is performed in the background, while waiting for voice commands. Stop command immediately disables both DC motors, without any conditions. __ In the testing of the prototype the team had some success. The idea was to test all the designed functionalities and as first were the wheels. There was a small problem with the rubber on the wheels touching the chassis because the connections with the DC motors and wheels are very close to each other. For this reason the robot did not go perfectly straight and the torque was higher. The microphone on the EasyVR proved to be a little weak. It had a hard time hearing the commands at times. All the other commands it understood quite well except with the command ‘’CHANGE’’ was almost impossible. That is when the team decided to change the command to ‘’SPIN’’ and this then worked better and the robot could change color. All the movement worked well and even the infrared sensor that was designed for detecting the paper proved to be working and the robot stops immediately on the edge of the paper.
- Prototype testing
In the testing of the prototype, which can be seen in the figure below, the team had some success. The idea was to test all the designed functionalities and as first were the wheels. There was a small problem with the rubber on the wheels touching the chassis because the connections with the DC motors and wheels are very close to each other. For this reason the robot did not go perfectly straight and the torque was higher. The microphone on the EasyVR proved to be a little weak. It had a hard time hearing the commands at times. All the other commands it understood quite well except with the command ‘’CHANGE’’ was almost impossible. That is when the team decided to change the command to ‘’SPIN’’ and this then worked better and the robot could change color. All the movement worked well and even the infrared sensor that was designed for detecting the paper proved to be working and the robot stops immediately on the edge of the paper.

- Price
The estimated price of the graphbot can be found in the table below.
| Component | Quantity) | Price (€) | Total Price (€) |
|---|---|---|---|
| Arduino | 1 | 25 | 25 |
| VR shield+microphone | 1 | 59.9 | 59.9 |
| Motorshield | 1 | 8.8 | 8.8 |
| Battery and charger | 1 | 20 | 20 |
| Speaker 1 | 3 | 3 | |
| DC motor and wheel | 2 | 9.34 | 18.68 |
| Stepper motor | 1 | 4.6 | 4.6 |
| IR sensor | 1 | 3 | 3 |
| Switch | 1 | 1.35 | 1.35 |
| DC-jack | 1 | 1 | 1 |
| Metal ball caster | 1 | 3.5 | 3.5 |
| Casing ABS | 1 | 1 | 0.89 |
| Total 149.72 |
To estimate the cost of the ABS a website was used [26]. The result can be seen in the figure below.
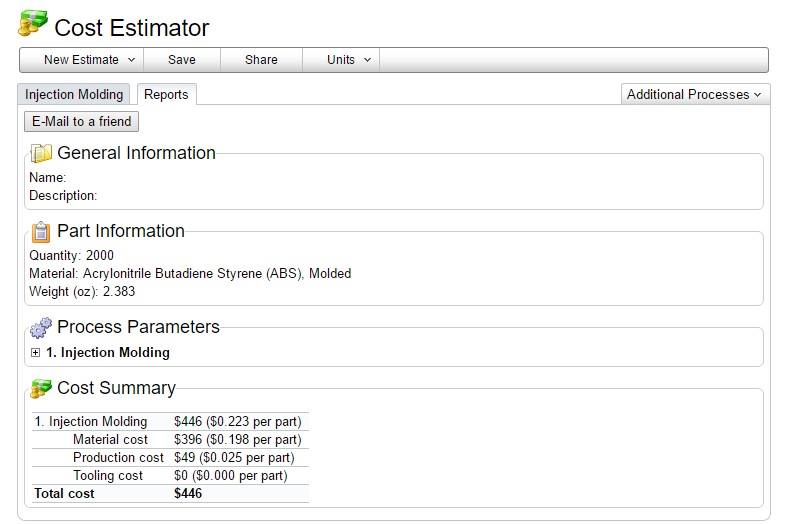
The product will be cheaper than 150 euros. We will order the parts in large quantities to get a better price from our suppliers. We aim to sell the product at a price between 160 and 200 euros.
- Conclusion
The Project Development phase is the most important part of work with the Graphbot. In this chapter the phases for developing the prototype have been introduced. The final casing has been created after obtaining the 3D model and further improvement in the workshop, regarding the assembly of the pieces, drilling, sanding, soldering, cutting, melting and using the screws nuts and all of the other necessary components in order to achieve the final design. The team has completed all the deliverables and met all the requirements, in the time limits. In the final phase, the Graphbot is able to perform its main goals, which were set up by the project supervisors: moving on a plane, drawing, obeying the sound commands and even changing the colors. All of the electronical parts have been assembled and soldered properly, together with optimized source code which allowed the robot to work properly. In conclusions it must be mentioned the effort that the team put into the final prototype. It was done just the previous night before the final presentation. Mechanical parts, which had been ordered appeared with 2 weeks delay, also the list of mechanical parts were not fulfilled. The team had to buy necessary screws and bolts by themselves. The team did the best possible work in specified time, money and workforce limitations. Future possibilities for further development are visible, but the prototype is in its final working form already, meeting all the requirements.
- Conclusions
The prototype of the Graphbot is working. The robot can go left, right, backwards, forwards and stop. It can change the drawing color automatically. All of these command are given by voice. The robot will also stop when it is about to leave the drawing paper. The Graphbot is however not perfect. Sometimes it does not recognize the commands immediately. The user has to repeat a command a few times. Or the command is wrongly interpreted. For instance the user says ‘Back’ but the robot recognizes ‘Right’. Sometimes the markers get stuck or are not touching the paper. But given the limited time of 4 months and budget: 150 of which we only spend 120 euros, problems like these are normal. The microphone for instance is a very cheap one. A more expensive microphone would make the interaction smoother. The license needed to enable any person to command the robot would also improve this. Nevertheless the main goals of the project were achieved.
Future improvements
Taking the actual finished and working prototype into consideration, there still are windows of opportunities for further improvements. For example, a solar system power source could be implemented, as well as innovative drawing techniques and last but not least, customer demands and needs. Furthermore, new version of the Graphbot could be invented, using gesture control. The possibility of uploading a drawing to the graphbot could be explored. This way the user could draw something on a computer and send it to the Graphbot. Another interesting path is to make it possible for the children to change the code and upload custom commands. A last remark is that the robot when going backwards still is able to draw past the drawing paper. The team recommends a second IR sensor at the back of the Graphbot.
Bibliography
[1]B. Malheiro, “Project proposal”, http://ave.dee.isep.ipp.pt/, 2016. [Online]. Available: http://ave.dee.isep.ipp.pt/~mbm/PROJE-EPS/1516/Proposals/EPS_PROJECT_2016_T1.pdf. [Accessed: 02- Apr- 2016].
[2]“mDrawbot Kit – Open-source Arduino Robot Building Platform|Makeblock Learning Resource”, Learn.makeblock.com, 2016. [Online]. Available: http://learn.makeblock.com/en/mdrawbot-kit/. [Accessed: 10- Mar- 2016].
[3]S. Bee, “Drunken drawing robot !”, Instructables.com, 2016. [Online]. Available: http://www.instructables.com/id/Drunken-drawing-robot-/. [Accessed: 12- Mar- 2016].
[4]“YC-S25OP State-of-the-art Technology Wall Printer For Individuality Home Decoration”, Chinahae.com, 2016. [Online]. Available: http://www.chinahae.com/product_yc-s25op-state-of-the-art-technology-wall-printer-for-individuality-home-decoration_13988.html. [Accessed: 13- Mar- 2016].
[5]V. Pavlovic, R. Sharma and T. Huang, “Visual interpretation of hand gestures for human-computer interaction: a review”, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 19, no. 7, pp. 677-695, 1997.
[6]B. Jutte, “10 Golden Rules of Project Risk Management”, Project Smart, 2016. [Online]. Available: https://www.projectsmart.co.uk/10-golden-rules-of-project-risk-management.php. [Accessed: 15- Apr- 2016].
[7]K. Rose, “A Guide to the Project Management Body of Knowledge (PMBOK® Guide)-Fifth Edition”, Proj Mgmt Jrnl, vol. 44, no. 3, pp. e1-e1, 2013.
[8]“Statistics - IFR International Federation of Robotics”, Ifr.org, 2015. [Online]. Available: http://www.ifr.org/service-robots/statistics/. [Accessed: 10- Mar- 2016].
[9]“Get ready. 5 consumer trends to run with in 2016.”, trendwatching.com, 2016. [Online]. Available: http://trendwatching.com/trends/5-trends-for-2016/. [Accessed: 10- Apr- 2016].
[10]D. Lavinsky, “Forbes Welcome”, Forbes.com, 2016. [Online]. Available: http://www.forbes.com/sites/davelavinsky/2013/06/07/three-steps-to-a-solid-marketing-budget/#52a92ea81178. [Accessed: 10- Apr- 2016].
[11]“Acrylonitrile butadiene styrene”, Wikipedia, 2016. [Online]. Available: https://en.wikipedia.org/wiki/Acrylonitrile_butadiene_styrene. [Accessed: 10- Apr- 2016].
[12]H. Srinivas, “Sustainability Concepts: Eco-efficiency”, Gdrc.org, 2016. [Online]. Available: http://www.gdrc.org/sustdev/concepts/04-e-effi.html. [Accessed: 05- Apr- 2016].
[13]H. Daly, “Toward some operational principles of sustainable development”, Ecological Economics, vol. 2, no. 1, pp. 1-6, 1990.
[14]P. Söderbaum, Understanding sustainability economics. London: Earthscan, 2008.
[15]J. Blewitt, Understanding sustainable development. London: Earthscan, 2008.
[16]“Cork in Portugal”, www.cork.pt, 2016. [Online]. Available: http://http:www.cork.pt/cork-industry-in- portugal.html. [Accessed: 14- Apr- 2016].
[17]“Key concepts: energy efficiency”, Nrcan.gc.ca, 2016. [Online]. Available: http://www.nrcan.gc.ca/energy/efficiency/buildings/eeb/key/3967. [Accessed: 10- Apr- 2016].
[18]“Code of Ethics | National Society of Professional Engineers”, Nspe.org, 2016. [Online]. Available: https://www.nspe.org/resources/ethics/code-ethics. [Accessed: 30- Mar- 2016].
[19]B. Markgraf, “Ethical Practices in Sales & Marketing”, Smallbusiness.chron.com, 2016. [Online]. Available: http://smallbusiness.chron.com/ethical-practices-sales-marketing-64319.html. [Accessed: 28- Apr- 2016].
[20]“Academic Ethics and Integrity”, Pine Manor College, 2016. [Online]. Available: http://www.pmc.edu/academic-ethics-and-integrity. [Accessed: 10- Apr- 2016].
[21] rinkesh, “What are Environmental Ethics? - Conserve Energy Future”, Conserve-Energy-Future, 2014. [Online]. Available: http://www.conserve-energy-future.com/environmental-ethics.php. [Accessed: 10- Jun- 2016].
[22]A. Cochrane, “Environmental Ethics | Internet Encyclopedia of Philosophy”, Iep.utm.edu, 2016. [Online]. Available: http://www.iep.utm.edu/envi-eth/. [Accessed: 30- Mar- 2016].
[23]J. Hansen, “Introduction - European Project Semester”, Europeanprojectsemester.eu, 2016. [Online]. Available: http://europeanprojectsemester.eu/info/Introduction. [Accessed: 30- Apr- 2016].
[24]“ColorADD”, Coloradd.net, 2016. [Online]. Available: http://www.coloradd.net/index.asp. [Accessed: 04- May- 2016].
[25]R. Siegwart and I. Nourbakhsh, Introduction to autonomous mobile robots. Cambridge, Mass.: MIT Press, 2004.
[26]”Injection Molding Cost Calculator”, Custompartnet.com, 2016. [Online]. Available: http://www.custompartnet.com/estimate/injection-molding-std/. [Accessed: 16- Jun- 2016].